
{kind=link}
So, how or why did Dieter Schlüter enter into the race to make a radio controlled helicopter; from his own comments.....
There is much that could be told: the nights of discussion with friends as to how a helicopter actually flies, what could be done with model materials, whether it was possible at all. Which motor? How heavy should the model be? What gear reduction? What type of gearbox? How best to make rotor blades, and how long, how wide and what section? A small rotor with narrow blades operating at high speed? Or glider wings rotating slowly around a shaft? Or this, or that, or the other? It was absolutely unknown territory. All we had was the desire to have a helicopter: it would be marvelous not to need a take-off strip any more, just to be able to hover, to lift up a weight and set it down again, etc., etc.
Where do such dreams come from?
For my part I had lost the urge to fly 'normal' model aircraft. Several times regional champion of Hesse in R/C 1, a few times in the top ten in the German National Championships-that was my absolute limit. I just did not have what it takes to be No. 1. Demonstration flights with low level inverted passes, balloon bursting and mock dog-fights had all become run-of-the-mill, and as (usually) everything worked out well, it was all becoming almost boring. So why not a helicopter?
And I was not the only one who thought this way. People were talking, machining and experimenting in many places, and the total number of hours sacrificed to the idea must be vast. Many gave up again, some kept going through to the first competition in 1968. A few kept on trying in spite of constant disappointments, had to put up with ridicule at their efforts, and spent their time in the workshop instead of with their families.
So my report can only cover part of the development, and only from my personal viewpoint.
My specific training? Precisely nothing! I was an engineer, to be sure, and a motor vehicles consultant, but how a helicopter flies? Not the least idea! I had to seek out information on the subject for myself, from specialized literature, visits to exhibitions, contact with the full-size machines. It was almost a second course of study for me, and a very intensive one at that. And of course there was a certain amount of ambition mixed in, as I wanted to master the subject.
My equipment? A medium-sized hobby workshop, a small lathe with drilling and milling attachments, a few metal-working tools, and 'normal' modeling tools. And this is where I started:
1967
 My first helicopter (1967).
My first helicopter (1967). 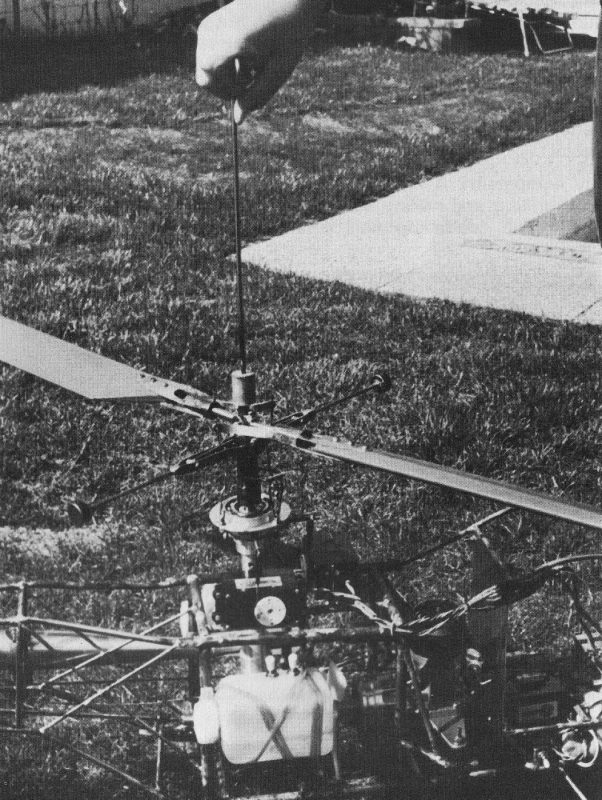 A simple 'clutch'
A simple 'clutch'
With a frame of MS pipe, a 10 cc motor, 1.6m rotor diameter, 4 function control, worm gear drive (from a Taxi tachometer) with 10:1 reduction, BELL system of stabilization and control, no collective pitch. Thrust control via throttle with a 'fixed' set tail rotor pitch which was mechanically adjusted to get reasonable torque balance for the main rotor. The model flew many times in Autumn 1967, reaching about 50cm altitude, and was surprisingly stable. It did not have a marked tendency to rotate, and would hover around for 10 or 15m, without noticeably responding to the controls. It was the result of more than six months' experiments aimed at finding the ideal blade size, gear reduction etc. There were just no points of reference. Bearing this in mind, this first result was extremely encouraging, and if the control throws were increased slightly, then surely it would or so l thought!
With the throttle set as low as possible, the main rotor was given a powerful push, and was engaged by pressing downwards. This worked quite well, but you could not disengage the clutch, and had to wait either until the fuel ran out, or the motor stopped -which usually happened quite quickly, as the cooling system was inadequate.
As can be seen, the model was stable but NOT controllable and it would be the mix of the two that was to cause a lot of the problems. So, a reasonable success and it showed promise for development however, Dieter was about to commit one of the cardinal sins in development engineering i.e. changing more than one thing at a time. Fixed pitch, though not a 'full size' feature had provided quite a sound method of height control without too much torque reaction so the question to ask is why did he not do exactly what his comments imply i.e. work on the main rotor control????
1968


Early 1968 and number 2 was ready. Bell system again, but now with friction dampers and large control throws. And with collective pitch. The result: on lift-off, uncontrolled rotation around the vertical axis, constant difficulty with controlling the tail rotor, extremely vicious response to the main rotor controls. To sum it up-nothing worked. Tethering it did not help, nor did any amount of patience and pleading. It simply would not work. No comparison with the previous model. l started to broaden my knowledge by collecting technical books, and got advice from the 'full-size' experts. For the first time l found out about asymmetrical airflow, gyroscopic forces, flapping hinges, lead/lag hinges etc., and how complicated it all was. A big propeller just spinning round could not possibly work-so they said. And l followed their (well-meaning) advice.
There is a saying, "what is the definition of an expert"...???? Ex is a 'has been' and a s'pert is a drip under pressure.
Dieter then made the classic engineers mistake of over-complicating things when faced with difficulties i.e. designing in solutions to the problems instead of designing the problems out. Plus he listened to experts however, there were NO model helicopter experts and a lot of what he was being told applied to full size machines. there was also the 'Froud' sizing problems which basically meant as things were made smaller (or lighter) they reacted quicker and by a 'square' rule i.e. quarter the size then reaction time multiplied by a factor of 16. Dieter was to learn this the hard way with his next model.
A step back to model one was perhaps the order of the day?



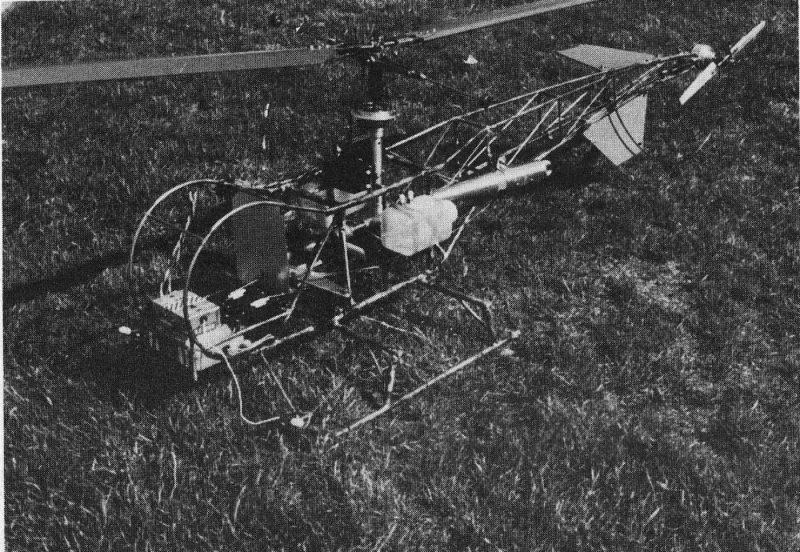
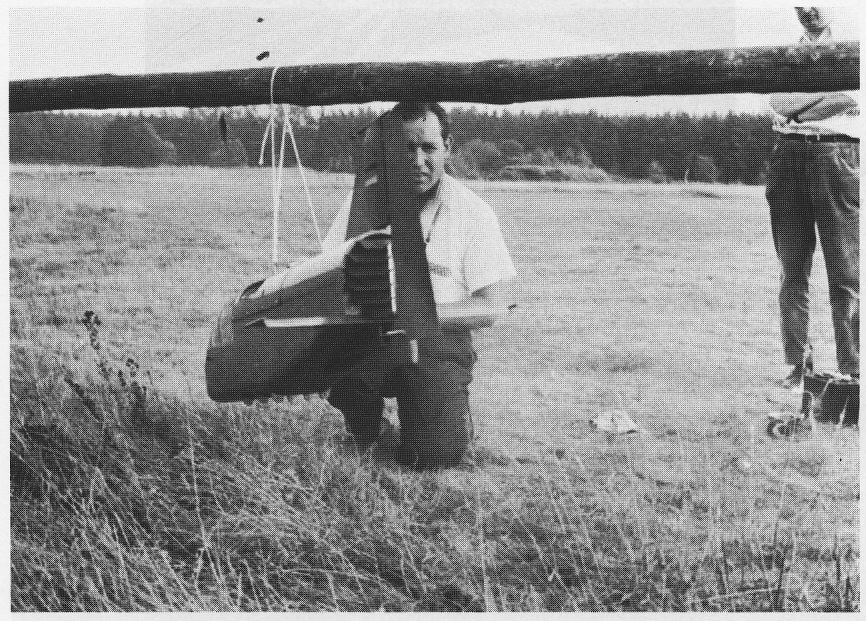
And then came No3 in Summer 1968; a semi-scale 'Sikorski S58' with all the frills: 5 main rotor blades, collective and cyclic pitch (directly-controlled), flapping hinges, lead/lag hinges with friction dampers, automatic switching to auto-rotation, freewheel, centrifugal clutch etc., etc. According to the literature on the subject, you needed all that for a helicopter! Sometimes it all worked, too, but the pilot didn't have a chance! It would take off, and had a good climb performance, but what followed was a series of lightning-fast movements which were quite impossible to control properly. Nevertheless, l thought that l could master such a machine. A bit of practice, refine this or that and generally wait and see what would appear at the first helicopter competition on 14/15 September 1968 at Harsewinkel. The attraction there was a few thousand DM for the best helicopter.
Specifications; Worm drive to main blades with ratio 15:1 and direct drive to tail rotor through tail rotor gearbox. Main rotor had four blades and ran at 800 Rpm with a four blade (flat profile) tail rotor turning at 3000 Rpm. Super Tigre 60 engine with 'all up weight' of 9.5 Lbs bit measured available thrust of 11.5 Lbs so problem with vertical performance. full castoring tail wheel to allow rotation movement without 'tipping' the helicopter over.
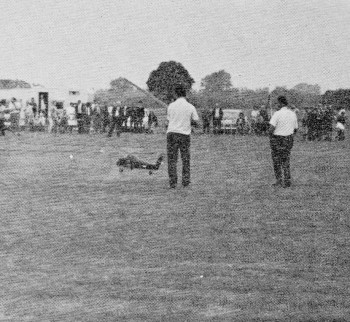 use of the 'Angel'.
use of the 'Angel'.
So, it looked the part and had all the whistles and bells but would it work OK, as Dieter says only time would tell at Harsewinkel. Additionally, Dieter had started using what the language translators call the 'Angel' and this is perfectly illustrated above and in the video clips. Basically it was a man holding a fishing pole over the helicopter with the end connected to a swivel on the top of the rotor. This helped to steady the helicopter and if correctly used did not cause the problems associated with being tethered however, it took a braver (or perhaps more foolish) man than most to be the 'Angel'.
Harsewinkel 1968
Success of a sorts but also it appeared that the goal of controllable rotary flight was still a long way off.
l immersed myself even deeper in the problems, and made contact with Professor Just at the German Research Institute for air travel in Stuttgart. There the heart of the matter was tackled using a computer and simulator experiments. The following suggestions resulted: Three-bladed rotor, high rotor speed (1600 RPM), large distance from the flapping hinges to the hub, heavy rotor blades.
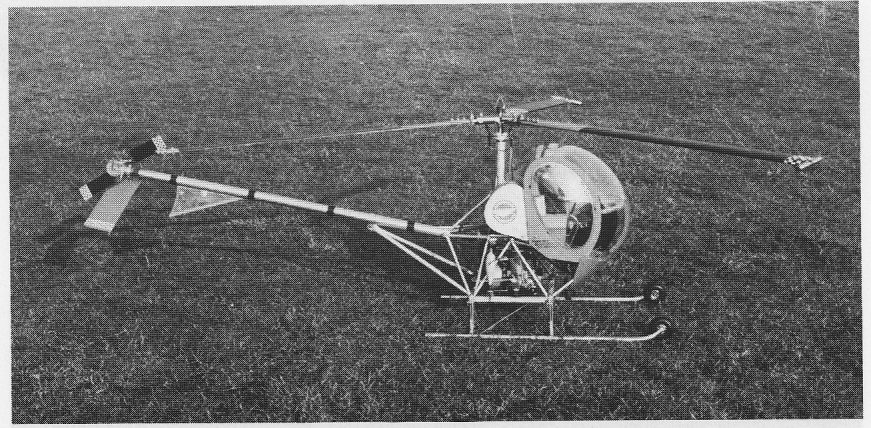

The 'Hughes 269H' was built on these lines. Open tube frame with aluminum tail pipe of 20mm diameter. The rotor blades' inertia was increased by adding weights (not jets!) to the blade tips. The pull on the blades was now 150kg per blade! 10cc motor, radio-controlled belt tensioner to act as clutch. Collective and cyclic pitch. Several flights of 10-20 seconds duration, under partial control, at heights up to 20m. But take-offs were always desperate affairs, with many heavy, uncontrolled landings and frequent damage. The biggest problem: mastering the tail rotor!
1969
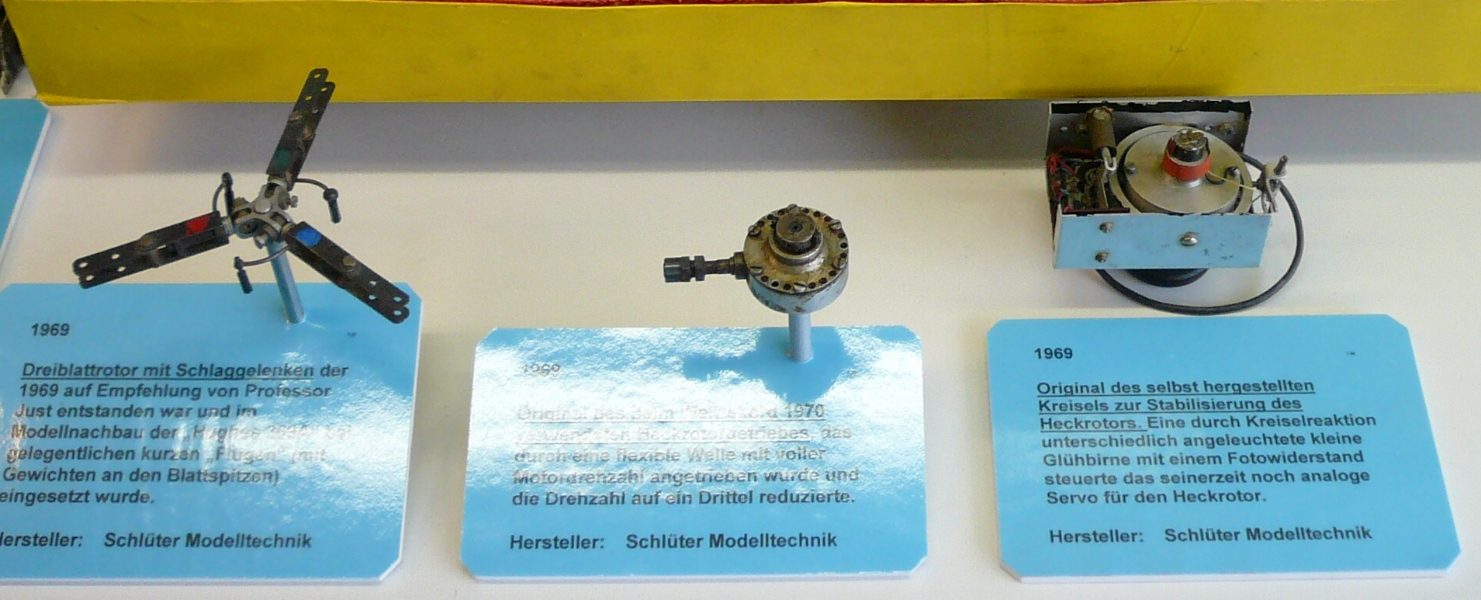

In Spring 1969, to get the constant turning away of the tail with collective pitch under control I built myself a spinning top (gyro) which was powered by a small electric motor (from a rowing machine). The gyro took almost two minutes until it came to full speed and then reacted very sensitively. Depending on the rotational motion, two photo-resistors (LDR's) were illuminated by a lamp moving across one to the other. The different resistance of the two LDR's determined the correcting signal for the analogue tail rotor servo. The gyro had worked well when testing, but it was mechanically very sensitive and difficult to adjust so did not significantly help.
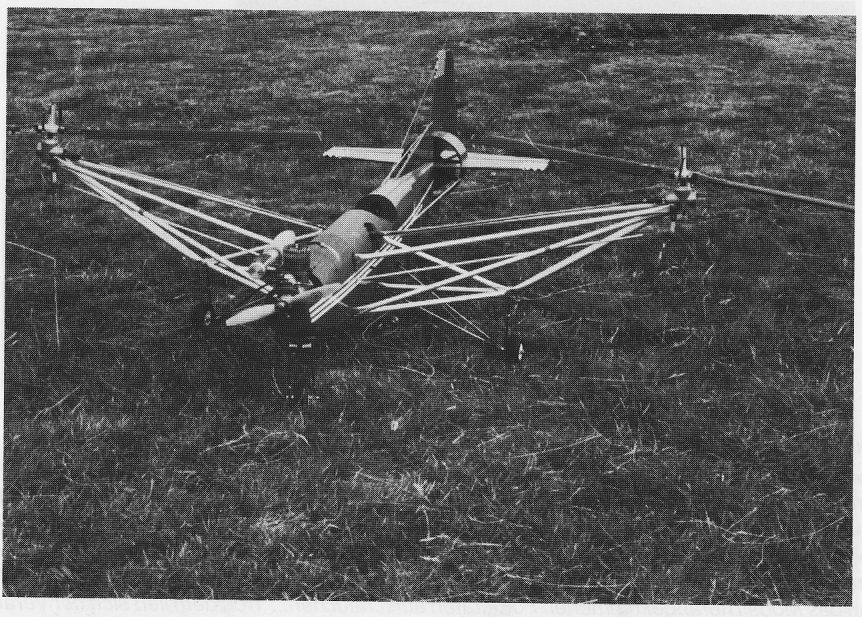
The problem of the apparently uncontrollable torque of a single rotor had to be overcome, and in Summer 1969 the 'FW 61 ' with its two contra-rotating rotors was completed. 10cc motor, with power take-off at the rear to drive the two side rotors via a central distributor worm gearbox. Rotors with collective pitch for vertical and lateral control. Motor cooling by propeller with lateral and vertical control achieved by the propeller airstream blowing over fins on the rear. This was quite good and in calm conditions the machine would hover quite well at about 20 or 30cm height. Lack of power and poor efficiency prevented it climbing higher. By inclining the nose down with the elevator, it was sometimes possible to achieve intimations of controlled forward flight. However, control by the fins was very slow and after a few very good 'hops' it landed badly.


Autumn 1969. The 'Twin rotor' idea would not go away. The mechanics were improved, and an impeller was used for good motor cooling. The very wide-based undercarriage prevented many an accident, and the new model certainly looked interesting. It also hovered quite well.
The cooling impeller blew air out of the back of the fuselage in a powerful jet, and a controllable system of vanes in the tail was installed to direct the airflow up and down. This provided excellent pitch control. The fin was also in this airstream, and control of the rudder allowed rotation around the vertical axis. Here is one of the many "test bench experiments'.
The drawback of the tail airstream: the model immediately set off forwards, and could not be stopped. A forcible stop made it rear up violently and it would fall onto its tail. The vanes were then replaced by a cover which could be swung in any direction. With the cover at "neutral; the air exited radially and evenly. By tilting the cover, the airflow in one direction was emphasized, and a sort of control was possible. In very calm weather l was occasionally able to carry out controlled flights over about 20-30m at a height of 30-50 cm: a partial success and very promising, but not the final answer

The problems of the radio-controlled helicopter were not solved yet. On the contrary: everywhere the story was of stagnation, and the idea was spreading that model helicopters would never be a feasible proposition, and if at all, then only with almost infinite technical complexity. Was this really true? It almost seemed so. Nothing seemed to work. Bell control system, Lockheed stabilization, gyroscopic aids, damped rotors, mufti-rotor models, nothing. This made me furious: after all, had l not managed a few useful flights now and then? And l had learned a lot from my many experiments. I sat down, analyzed all my earlier experiments, made up tables showing the positive and negative aspects, and made a point of avoiding reference to full-size practice in any way. I wanted a flying model, simple, robust, as little complexity as possible, and it should be able to fly and be controlled like a full-size helicopter.
Finally, Dieter returned to 'first principles' and examined what was required. The previous two years had not been completely wasted as a vast amount of experience had been gained and this was going to prove invaluable later one in speeding up the development process after success had been achieved. After all, in any development process it is as useful knowing what 'will not' work as much as what 'will' work.
The theoretical result: single rotor, two blades, variable pitch tail rotor (lifting section blades), no collective pitch control, rotor speed control via motor throttle instead, simplified control system and a wide-based undercarriage, no extras at all No sooner said than done: the old fuselage of the 'twin rotor' was cut down, fitted with the drive system, tail rotor and 20mm tail boom assembly from the 'Hughes 269A, and the new machine was ready.
A bell stabilised 'flapping' head was fitted and this hovered well with good tail control but again like the original prototype, very indistinct cyclic control. Increasing throws would not work as this had already been proved but what about using a simplified 'Hiller' system where the small blades gave both aerodynamic stability plus control to the larger blades. Large control inputs could be used and the 'follow up' rate could be tuned to give stability.
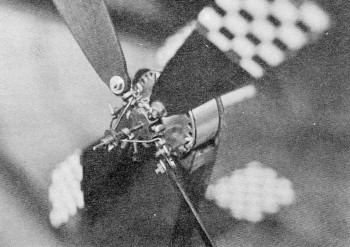
It was Christmas 1969. It also had a new rotor head with a 'Hiller' control system, using the aerodynamic damping and control assistance of the control paddles.


 Egelsbach airport near Frankfurt.
Egelsbach airport near Frankfurt.
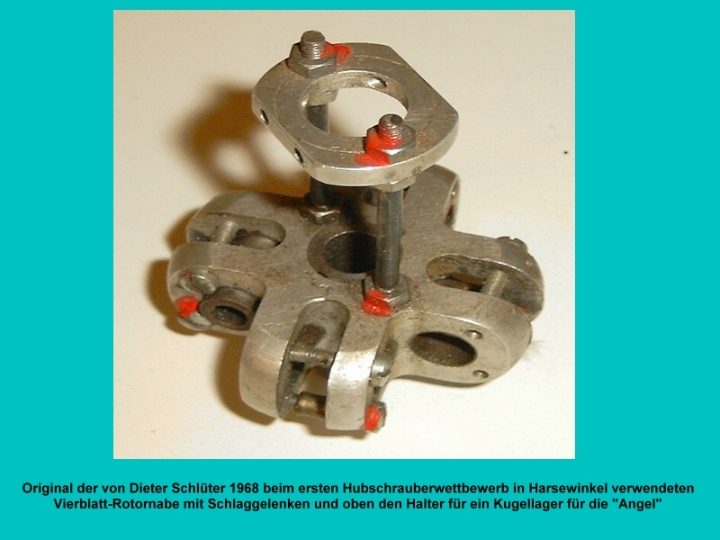
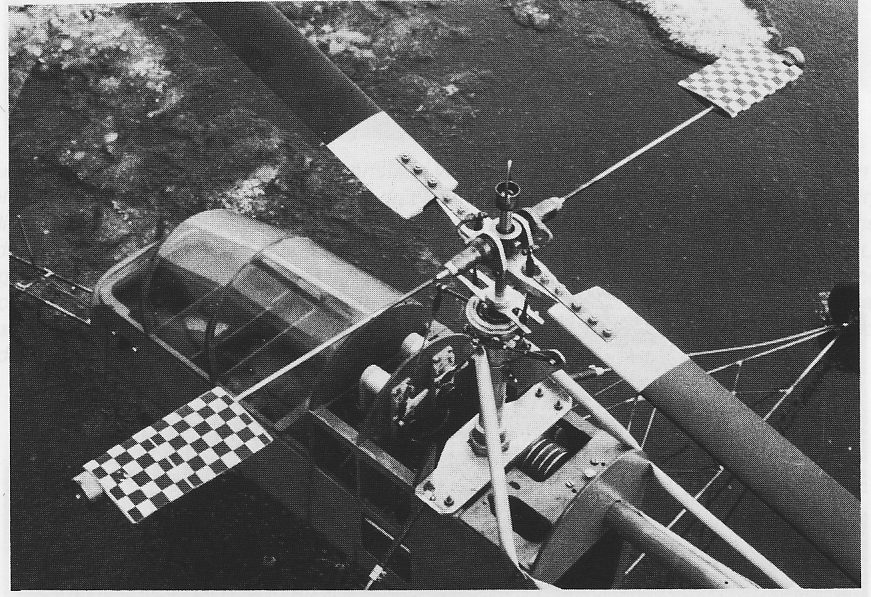
This was the rotor head. Fully articulated, two stabilizer bars (separate), 'Hiller' control paddles made of wood, with weights at the ends of the stabilizer bar, and cyclic control via the swashplate. Right on top can be seen the ballrace -mounted hook for flying tests in the tethered state. But this was only needed for a few minutes. l could tell immediately that this was the one. When / opened the throttle, the main and tail rotors speeded up at the same rate, and torque compensation was virtually automatic. Maintaining heading was no longer a problem (l remembered my first ever helicopter attempt!). Advance the throttle, the machine lifts off, is stable, and look, it responds to the controls. First 10 seconds, then a 20 second flight, then 30 seconds. Later it was over the minute. And that was in a strong wind, with heights up to about 10m, and in icy cold conditions. This was between Christmas and New Year 1969. Just one problem: when inclined forward fairly steeply, forward speed could not be braked, and the model slowly but surely would dive in. The only remedy was to land quickly. The reason was that the 'Hiller' control paddles developed powerful return forces, which the servos could not cope with. Then one day it hit very hard
1970
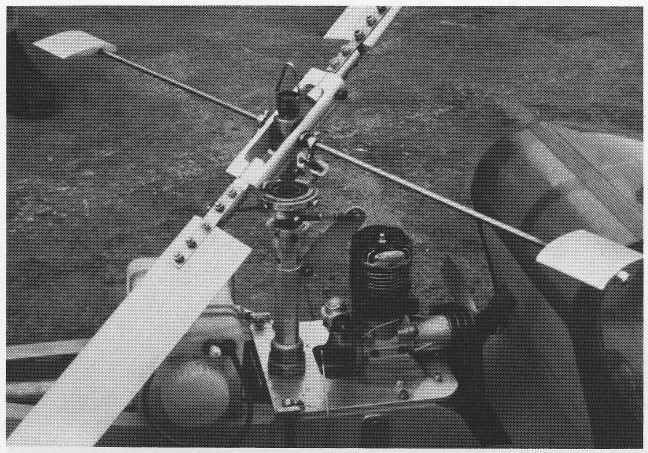
This was the solution. Fully universal rotor with a single, one-piece stabilizer bar fitted with metal paddles. The one-piece stabilizer bar resulted in the return forces of the two paddles canceling each other out, so that the servo could control the paddles without difficulty. The remainder of the old mechanical system was fitted into a quickly assembled open model, and now it all worked. Test flying carried on through January/February 1970 and proved the concept.


But the model had to look like something, and so l built the fuselage of the Bell Huey Cobra around the mechanics. A centrifugal clutch was developed, an improved cooling fan, an electric starter with V belt drive to the motor, a reduction drive tail rotor gearbox, and a drive shaft running from the motor through to the tail rotor. The head was redesigned to make the rotor disc hang below the pivot point and provide balance when building up head speed from rest. It was also fitted out with the attachment for the training 'Angel' but this proved to be unnecessary. The model flew, and how! Now it was up to the pilot to get used to the controls.
Dieter continued to practice hovering and general 'jerky' short flight movement but 'proper' flight into circuits had not been attempted and the next Harsewinkel meeting was due in a few weeks. However, as the next extract shows; fate can step in to force the situation.
 photo taken after the first 'circuit'.
photo taken after the first 'circuit'.
Flight Report:Sunday, 12.4.1970-Jungesheim flying site, near Frankfurt am Main.
"... and so after perhaps 5 or 6 hovering flights of about 10 minutes each, I felt I was beginning to get the measure of the helicopter. My control of it was by no means precise and secure, let alone skilful. But the model no longer had the upper hand, and I had a fair chance of setting it down where I intended.
The next stage was my first 'circuit'.
I must admit that I really did not intend it to fly away from me, but suddenly it had happened, and there was no going back. I very timidly began to ease the model into forward flight. First 5m., then 10m, then 15. Suddenly it was at 20-25m, climbing far too fast, and accelerating forwards. It had reached the end of the site, where the tall grass began-what now? Less forward cyclic, increase throttle slightly, hold it on course and wait. Before I knew what was happening, the machine was 20-25m up and about 80-100 m away from me. What now? Turn it round. Right then, a gentle turn, just don't crash it now! The model is banking, but doesn't turn. 150 metres away now, and 30-35 metres up. Stop, for Heaven's sake! Feed in a little tail rotor. It works! The machine is coming round, looking fine. Hold altitude, don't panic! Through 180° now, straighten up, off with the turn, correct tail rotor.
Here it comes!-I feel relief and anxiety at the same time. Now the model is above me, far too high, 30-40 metres. And still it's climbing, higher and higher. Let's turn her again; that's better already; the machine will put up with very large control movements, more than I would ever have believed. The model is sideways on to me now, still climbing. I must do something about that climb if I want to take the machine home in one piece. Throttle back, then more- but it won't come down. On the contrary, now it's heading off forwards, slowly and elegantly, and the motor is puttering at about half throttle; you can hear the blades throbbing. How long have I been up? Two minutes, three minutes? I don't know. Good Lord, how much fuel was in the tank, no idea. Okay then, let's land before it's too late. Throttle back even further then model is right over the spot. Now she's sinking, gently at first then faster, suddenly too fast! Open the throttle, last chance then the motor picks up, the model recovers. But, I’ve forgotten the tail rotor and the increased torque. The machine turns 180° left and the nose drops. Faster and faster, diving at about 45° straight at me and my colleagues. That's it, it's finished, just a heap of wreckage.
But no, full throttle and pull hard back on the stick and it works; the nose rises, the machine is flying at a fantastic speed and thunders past us at about 2m altitude. In an instant it is 25-30m high again. Phew, fortune smiles on me again and what good fortune. I would never have believed that the model could recover from such a situation.
So it works, control is good, power is adequate even for that sort of situation. The thought flashes across my mind - I will stick with this method of control.
But what now, the model is still up there! So, the same procedure again, but carefully this time. It seems like an eternity, struggling with that landing. It gets away from me twice more, just like before, but not so critically. And then-I've made it. 6-8 metres up, right over the spot, and down it comes to settle gently in front of me. No damage, not a scratch; just as if that flight was an everyday occurrence. A roar goes up-people are clapping, friends thump me on the shoulder, but it is no good talking to me. I am exhausted, absolutely worn out. How long was I up there, then? More than five minutes, comes the reply. I can scarcely believe it. It seemed like an eternity!' That report of my first helicopter circuit, which lasted over five minutes and ended successfully, appeared in the July issue of 'Modell' magazine in 1970. It described the successful conclusion of a line of development which had occupied many years, involving a vast number of theories, ideas, experiments and failures. The occasional partial success spurred me on again and again to conquer the problem of the radio controlled model helicopter.
Finally it was done; successful, witnessed and recorded RC helicopter flight, with the emphasis being on 'controlled'. The previous model of December 69 as far as general flight was concerned 'worked' and if at the time more powerful servo's had been available then perhaps the separate stabilizer bar control method might have been the one to be displayed....!!! However, that was not to be and after the use of the 'Flybar' the rest is history.
Harsewinkel 1970
On completion of Harsewinkel and the unofficial record a number of modifications were required especially as the gearbox had overheated. For the attempt on the duration record the overheating problem was solved by fitting an oil pump to circulate oil through the gearbox then through an oil tank that was strapped to the side of the body and cooled by the downwash from the main rotor.
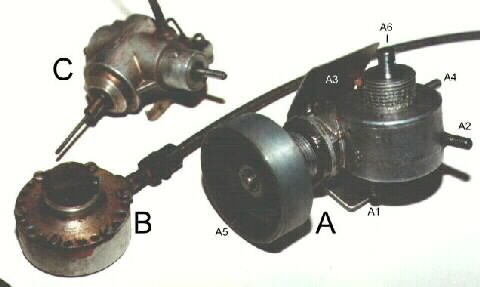

A - Worm drive gearbox for the first long flights. The gearbox overheated quickly and so had an extra oil cooler. A1 is the oil supply, A2 of the drain. A3 is an additional heat sink. A4 is the tail rotor shaft coupling with direct access to the A5. A6 is the connection for the main rotor shaft.
B - Associated tail rotor gear with reduction 2.5:1 and the flexible shaft, which had full engine speed (!)
C - Tail rotor gearbox with a reduction ratio of only 1.5:1. At 10,000 rpm motor, the tail rotor was therefore ~ 6666 rpm.
So, that was the end of the line of prototypes. What was to follow, after re-design for manufacturing purposes would be the worlds first Radio Control Helicopter Kit.
Prototype Cobra - Technical description in Dieters own words of his model Cobra taken at the time of the world record.