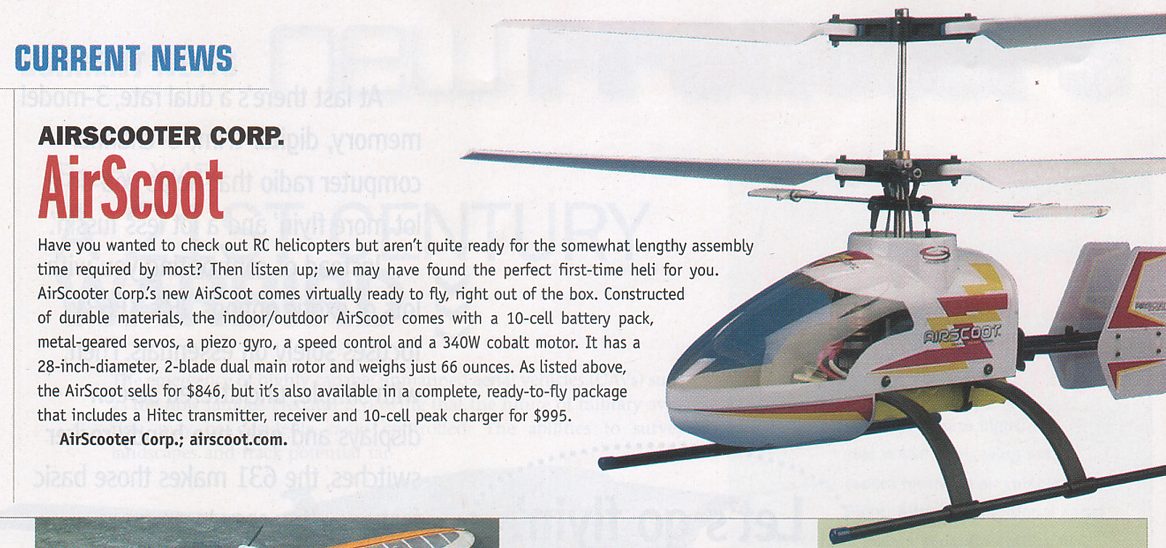
Air Scooter Airscoot
The Air Scooter corporation was an American company who took the twin rotor design to develop into a model, a UAV (unmanned Aerial Vehicle) and a home-build helicopter. Gene Rock had a help in its design though he did not want the 'vane' system fitted.
Airscooter Airscoot (2002)
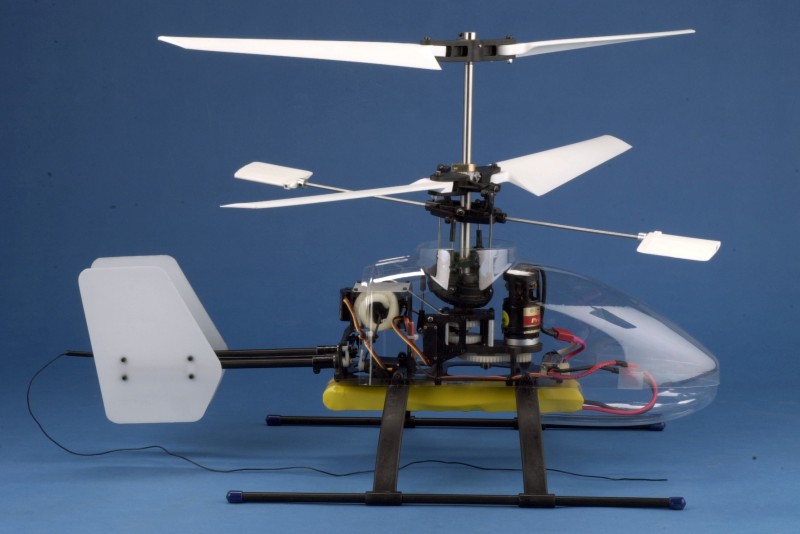





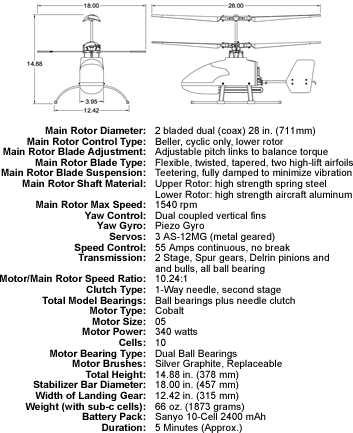
Introduced in 2002, the model utilised Contra-rotating main blades driven by a single electric motor and tail defectors for rotation control. Mechanically very well made made though the concept of tail deflectors control had in the past proved to be marginal at best plus the design of the landing gear was poorly considered. Additionally it was very, very expensive when compared to general helicopters of that time.


Airscoot Review - Apr 2003 Mike Mas - Rotary / Airscoot Review - Flying Models / Airscoot Review - HTM / Airscoot Flying - Unknown source
I have included three US reviews which came out at the time of the Airscoot's introduction however, none of them really describe the flying aspects and with hindsight have wording that 'hints' at not wanting to say what they really found. There is also a short low resolution video of one indoor flying which is where it looks to be OK but still has that 'wobble: that all contra helicopters seem to fly around with.
However, these aspect were found out by those who bought them and my review below seems to be indicative of the general comments that my research has uncovered.
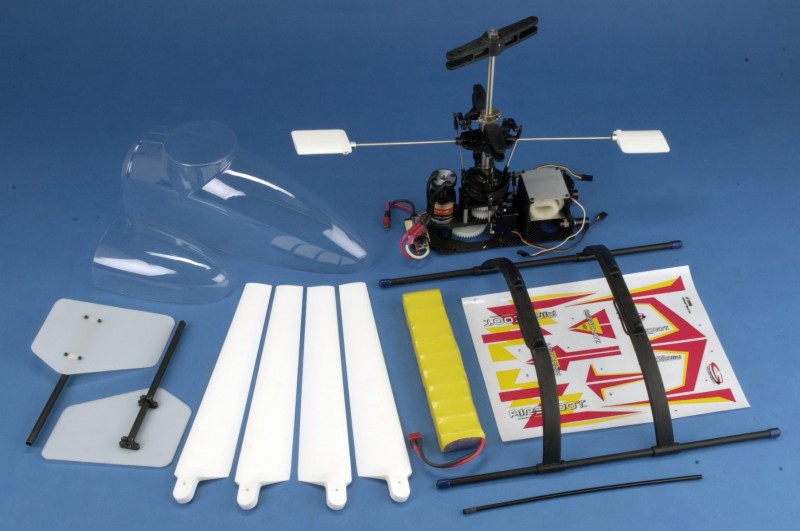
Airscoot Manual - Build manual including set up details.
Airscoot Parts Manual - Full listing
As a historic note; in 2010 saw one about this size that had a tail rotor and was reputed to fly well.... So Airscoot, nearly, but not quite......
 Contra rotating helicopter with single electric motor and tail defectors used for rotation control.
Contra rotating helicopter with single electric motor and tail defectors used for rotation control.
In 2010 when researching this helicopter all reference's gave it a reputation as POS (Piece of S~~t) however, I did like the look of it and thought that perhaps this was an undeserved reputation. Additionally it was a very rare helicopter in the UK so when one came up for sale, I bought it.
Set up as per instructions i.e. balance mechanically the two rotors in flat calm conditions with the tail control surfaces vertical (or removed) so that there is no rotation of the helicopter; then reconnect tail control. Tested indoors and sort of OK though tail control not very positive. Second test in the garden and a little bit blustery but again not too bad but tail control needed lots of work and very vague though general direction could be kept. Had a couple of successful garden periods and not as bad as made out but certainly not for a tyro as tail control required smart work to keep directional heading. Also the flat landing skids kept catching in the grass and would tip it over so required a very positive touch to take off and land.
All seemed to be reasonably OK so I though I would try a heading hold gyro...... If anything not as controllable as the tail deflectors would stay over when heading changed and already I had found out that 'pulsing' the deflectors was more efficient. Then finally a gust and change of wind direction just spun it round to head for me (which missed) and flew straight into one of the small trees and there was nothing that I could do that seemed to stop it. OK, POS is it then......................
It is of historical interest to note the one of Schlüter's late 60's design used a tail deflector (engine fan driven) and he found this to be very inefficient and went back to a tail rotor. Problems are that to deflect air one way causes a reaction in another (that man Newton); so every time the tail deflectors move it tends to push the tail down as well as rotate. In the hover this results in the helicopter moving off backwards or when in forward flight it nose's up. In addition the thrust is very low and is dependent on main rotor thrust so when the speed is reduced to lose height, thrust is reduced and directional control dramatically reduces.
At this point I left further testing until I could take it to the ship where indoor flying conditions would be perfect and big enough not to hit anything. Depending upon the result I would look to modify it with a 'proper' vertical tail rotor with two way speed control or a simpler alternative would be to 'bias' the main rotor to provide a rotation in one direct (a la single rotor dynamics) and have a one way speed controller to counter this; could be interesting.................
I purchased another near complete model in order to leave one as original and the other modified however, as of 2012 I had not got round to do anything with them.