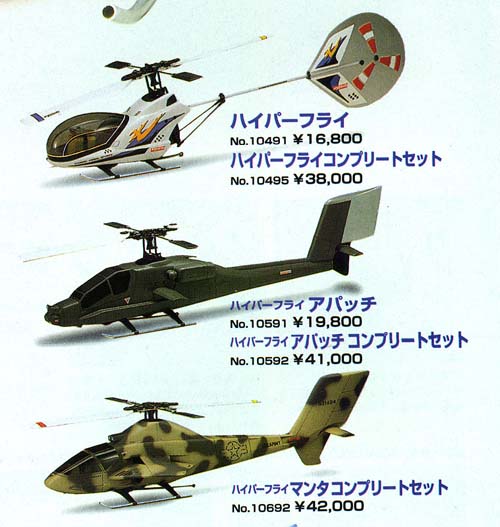
Kyosho Hyperfly

The principle was revolutionary at the time with the model looking just like a helicopter but using only two channel radio control and standard servos. The radio operates elevator (for up and down control) and aileron (for left and right control) with a constant motor speed. Using the Kyosho AP29 electric motor(AP29BB available as an upgrade option), the model was efficient and quiet to use. Hyperfly was constructed from a plastic frame, flexible moulded body and foam core rotor blades with a hard plastic covering then finished off with high visibility decals to aid orientation. The Hyperfly did not need a tail rotor and instead had a moulded 'dish' which gave the required stability in the air. For this to work the model had to be 'flown' though in a slight breeze, the model could be made to simulate a 'hover' by matching the elevator control to the wind speed.
As the Battery power decayed, the Hyperfly would be lined up into wind and making an 'aeroplane' approach, brought in to land with the motor being automatically shut off as the landing switch arm was pushed back as it touched down.



Kyosho Hyperfly Apache

The Hyperfly Apache has the same features but recreated the look of the McDonnell Douglas AH-64 Apache, one of Operation Desert Storm's top fighting aircraft. It included decals but had a clear plastic fuselage which required painting.
The control layout worked but in effect the result was more a cross between a standard aeroplane and an autogyro. Additionally the control layout meant that with a fully charged battery climb performance or speed was good and in a similar manner to an aeroplane, one could be swapped for the other. As the battery voltage reduced then keeping it in the air started to get difficult and a landing had to be attempted before it became impossible to stay airborne; unfortunately diving in the approach would cause the speed to increase so unless a long landing area was available, most landings resulted more in a half crash. The design however was such that unless you were really unlucky no damage resulted and the battery could be charged then off again. Alternatively, if an attempt to slow down on the approach was made (i.e. to flair) then it started to climb and would overshoot thus needing to repeat the manoeuvre with an every decreasing battery capacity. To counter this a speed controller (ESC) could be fitted between the battery and motor thus replacing the fold up motor cut-out switch. This configuration did alter the characteristic dramatically; with motor speed control came the ability to directly change height without the need to balance it against speed so no longer was it necessary to wait until the battery started to run down before making a landing. The approach could accurately flown with control of both speed and height plus, with a bit of wind it could near enough be 'hovered' as it touched down. Similarly take offs were possible, though it did tend to rotate to the left until forward speed built up. Additionally, similarly to a landing, with speed and height more controllable emulating a helicopter in forward flight was more realistic.
Hyperfly Apache review - By Dave Day



Kyosho Hyperfly Manta
In addition to the 'Apache' the Hyperfly could also be fitted with a 'Manta' fuselage; though information suggests this was not available in the UK.


NOTE - Though the Hyperfly was marketed by Kyosho, a Japanese firm, the actual principles of the model was developed by an American modeller.