RC Helicopter History - Pre 1970
During my initial research in 2009/10, it quickly became apparent that it was not going to be easy to identify time lines regarding the pre 1970's. Personal recollection of those involved whilst extremely useful could have inaccuracies and documents tended to be remembered by the date published and not by the actual dates of the events. Of note is the fact that much of the references concern Dieter Schlüter, this is due to his 'Engineers' approach to keeping logs, his use of filming events for development purposes and his book that documented these events.
By mid 2011 though I had enough information to make an initial start and my list of names for further referencing was growing. Note that as this web site is a 'work in progress' you will find a number of notes regarding names and events I have found mentioned but have no further info (as yet).
I do not intend to get into the arguments that over the years have questioned who was first in this that or the other though when providing this information I will include any historic arguments so you can then make up your own mind. Finally any information you may have regarding this subject would be welcome be it fact and documents or just plain old memory recollection; the latter IS useful as coupled with facts from perhaps another source, helps to complete the overall picture.
Helicopter definition
hel·i·cop·ter
- An aircraft whose lift is derived from the aerodynamic forces acting on one or more powered rotors turning about substantially vertical axes.
- A vertical-lift aircraft, capable of hovering or moving in any direction, having a motor-driven, horizontal rotor
intr. & tr.v. hel·i·cop·tered, hel·i·cop·ter·ing, hel·i·cop·ters To go or transport by helicopter.
[French hélicoptère : Greek helix, helik-, spiral; see helix + Greek pteron, wing; see -pter.]
Word History: The two Greek words that are the origin of helicopter may be particularly hard for English speakers to spot. Helicopter was borrowed from the French word hélicoptère, a word constructed from Greek heliko- and pteron, "wing." Heliko-, the combining form of helix, "spiral," has given us helico-, which can be joined with other words and word forms to create new words. The consonant cluster pt in pteron begins many Greek words but relatively few English words. English speakers unfamiliar with Greek are thus not likely to recognize the word's elements as helico-pter; many analyze the word into the elements heli-copter, as is shown by the clipped form copter.
Depending on which dictionary you favour, the definitions can be importantly different. The more technical description at 'a' focuses on the requirements in generating the necessary lift to rise and stay above ground but, implies that the aircraft does not actually have to be capable of movement at all or if moving it does not have to hover. On the other hand, the definition at 'b' better highlights the control requirements for a helicopter but again says hovers 'or' moves which implies a choice plus it only gives a very basic requirement for achieving this control. However, from research the general consensus has the requirements below as the definition of what is considered to be a 'helicopter';
A vertical-lift aircraft whose lift is derived from the aerodynamic forces acting on one or more powered rotors turning about substantially vertical axes, being both capable of hovering and moving in any direction.
It is this definition that will be used when considering the description of a 'true' helicopter but just to complicate matters further what is hovering?? The ability to be stationary above a point on the ground? If so then you also have to state in 'nil' wind conditions as even a STOL aircraft can be 'stationary' above the ground in a wind.
Control definition
Remote control of a helicopter had been achieved by Arthur Young in 1941 and was used in the development of full size machines being achieved through connection of an umbilical; this kind of control was later to be known as 'fly by wire' and this method was popular for early control of missiles and rockets. Remote control of an aircraft by 'radio' was also well proven and used in many applications i.e. military drones, crash testing 'real' aircraft etc however, the equipment required was both heavy and cumbersome. These aspect when dealing with full size applications was of little consequence but was of significant concern when applied to the reduced dimensions of model aircraft; it would requiring years of development in 'miniaturization' following on from the development of the semi-conductor before it use in models would be possible.
It is the latter aspect of 'Radio Control' that will form the focus for this history though some mention of other methods of control will be required where it is pertinent to the subject.
Pre-amble
The first radio controlled model with a helicopter layout was a private venture by Lockheed in 1958. This was built to test the new idea by Irven Culver of the 'rigid' rotor and the 'gyro' control system. It was powered by a McCoy 60 engine, had an 8 channel reed radio set controlling pitch, throttle and roll cyclic plus a 'mechanical' flybarless gyro positioned under the main rotor blades. It was not a 'true' helicopter in that the controls provided were obviously designed for forward flight only in order to prove the layout. However, just because it was not designed to hover doesn't mean that it would not have been capable of hovering if so provided with the controls necessary.
There is some documentary evidence of this model in part one of the Lockheed Cheyenne development film from 1959 located at the link The Lockheed Cheyenne Helicopter 1/4 (13 min 35 sec). The clip starts at near the four minute mark and shows a ROG (rise of ground) take off and straight into slow flight with a number of controlled turns. You have to remember that these test were to prove 'stability' of the rotor and therefore the ability to hover was not part of the trial as they already knew it would be able to do that. Watching the video and although it is only a short clip, the pilot does not look that stressed!!! True the film would be taken at the end of the testing so the pilot would by then be experienced but even so it looked to be quite flyable giving the indication that if the will had been there, it could have been completed as a fully functional radio controlled helicopter.
A late 60's copy of the American Modeller magazine carried a small report regarding the model Cheyenne along with the question of why after this apparent success, Lockheed or the modelling fraternity had not continued development further. Why indeed? I suspect that not a lot was made public regarding the technicalities of this model, for obvious commercial reasons, and thus it would just stay a 'dream' to those who may have even considered it; for Lockheed it was only a means to an end and again commercially there was no good reason to continue. Perhaps we will never really know why this early opportunity was missed....................
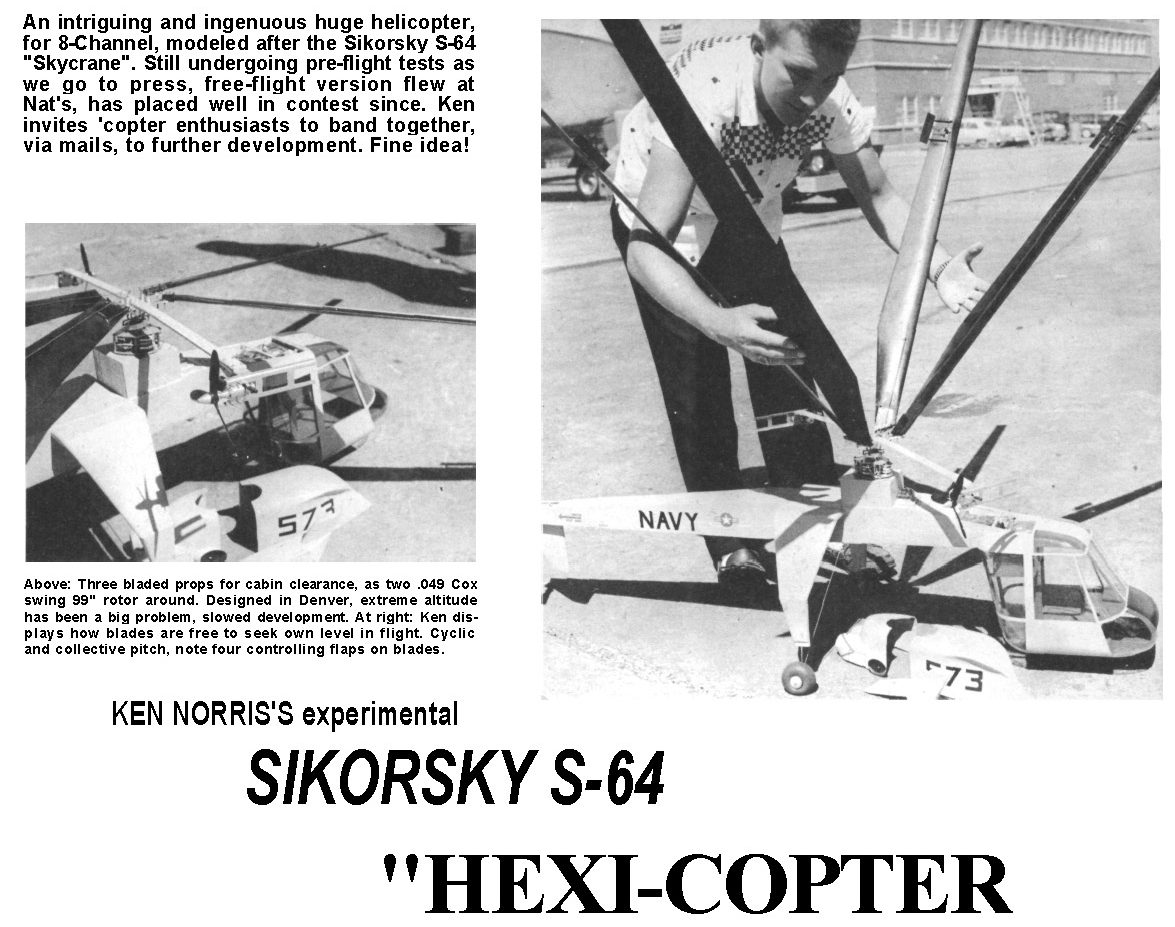 Ken Norris with S-64 and Construction Magazine article
Ken Norris with S-64 and Construction Magazine article
A partial answer to the missing development question came in the December 1960 issue of the UK magazine Radio Control Models & Electronics (RCM&E) and the Feb-Mar 1971 issue of US magazine Flying Model. Presented was an article on a model Radio Controlled helicopter of the Sikorsky S-64 Skycrane (which was yet to fly full size) by an American designer called Ken Norris. It was very ambitious at the time and without the benefit of proportional radio control however it did use centre adjustable reed equipment. It was based on his successful free flight models but this version was not as yet even flight control tested and thus was presented more for development and comment than to build as a flying model. It did have a very interesting suggested control method of utilising control tabs to increase and decrease the coning angle of each blade thus imparting either collective control, cyclic control or a mix of the two. As an engineer I can see the possible drawback straight away; because of the 'sine' rule the blades would have to move significantly up and down to cause a meaningful change in lift; I have visions of the blades spinning round looking like a fairground 'Waltzer' waving up and down. The only other mention I can find of this model is in a 1972 article by Gene Rock where he comments that he built one but was not successful due to not being able to get the engines to keep running; as there is no other reference concerning the model, even from the designer, I can only conclude further development was not undertaken.
The main drawback regarding helicopters in general was the perception that even the most basic of helicopters were complicated and that to miniaturise one would require full machine shop capability. In respects to replicating a 'full size' machine this wasn't too far from the truth so the average 'stick and tissue' modeller did not really stand any chance however, as we will come to see, replication of full size would not be required for a model. By the mid sixties a small group of modellers around the world were beginning to perceive the possibility and the following comments by Dieter Schlüter typify thoughts of these early experimenter:-
here is much that could be told: the nights of discussion with friends as to how a helicopter actually flies, what could be done with model materials, whether it was possible at all. Which motor? How heavy should the model be? What gear reduction? What type of gearbox? How best to make rotor blades, and how long, how wide and what section? A small rotor with narrow blades operating at high speed? Or glider wings rotating slowly around a shaft? Or this, or that, or the other? It was absolutely unknown territory. All we had was the desire to have a helicopter: it would be marvelous not to need a take-off strip any more, just to be able to hover, to lift up a weight and set it down again, etc., etc.
Where do such dreams come from?
For my part I had lost the urge to fly 'normal' model aircraft. Several times regional champion of Hesse in R/C 1, a few times in the top ten in the German National Championships-that was my absolute limit. I just did not have what it takes to be No. 1. Demonstration flights with low level inverted passes, balloon bursting and mock dog-fights had all become run-of-the-mill, and (usually) everything worked out well, it was all becoming almost boring. So why not a helicopter?
And I was not the only one who thought this way. People were talking, machining and experimenting in many places, and the total number of hours sacrificed to the idea must be vast. Many gave up again, some kept going through to the first competition in 1968. A few kept on trying in spite of constant disappointments, had to put up with ridicule at their efforts, and spent their time in the workshop instead of with their families.
1967 - The start of the journey
Right, lets step back a few years from that first recorded successful helicopter flight of 1970.
It is difficult to imagine in the modern world of computer designed RTF helicopters with stability and near perfect control, what it must have been like to 'start from scratch'. With hindsight the first Schlüter design was very much like the small electric helicopters that became popular after 2005 and were very auto stable i.e. the controls just 'annoying' the stable hover than positively causing it to move. It also showed that the rotor head was nearly right, only missing a flybar to be successful however, I get ahead of myself with that.
Dieter Schlüter's notes for 1967 provide a hint at what a number of people around the world had up to this time been attempting i.e. background research. Questions such as blade size, tip speeds (rotor rpm), etc had to be answered. Given the power outputs of the engines available to designers were not high, lift had to be maximised otherwise all that would result would be an engine driven 'fan'. It was apparent that varying degrees of success were being achieved in a number of important development areas but.......
Design Engineer v Practical Engineer.
Design Engineer - Over in the USA, American Modeller magazine of February 1967 carried a small report of the previous 1958 Lockheed radio Control model along with the question of why after this apparent success, Lockheed or the modelling fraternity had not continued development further; this article though failed to mention Ken Norris and his S-64???
As an aside, there was though one spectre raising it's ugly head in the sixties regarding interference from 'CB' radio or "Walkie Talkie". It was especially prevalent in the US and so had received early attention; in the article the change for 1967 to the American model radio frequency from 27 to 72 Mhz was confirmed thus taking it well away from the destructive effects of the CB radio. This problem was to hamper modellers in Europe for more than another decade before they too were forced to change frequency.
John Burkam a development Engineer with Boeing whose specialisation was vibration reduction and rotor design, had been working on a radio controlled Helicopter and in late 1965 completed the drawings for such a machine; though it wasn't until 1967 that RC Modeller magazine published them.
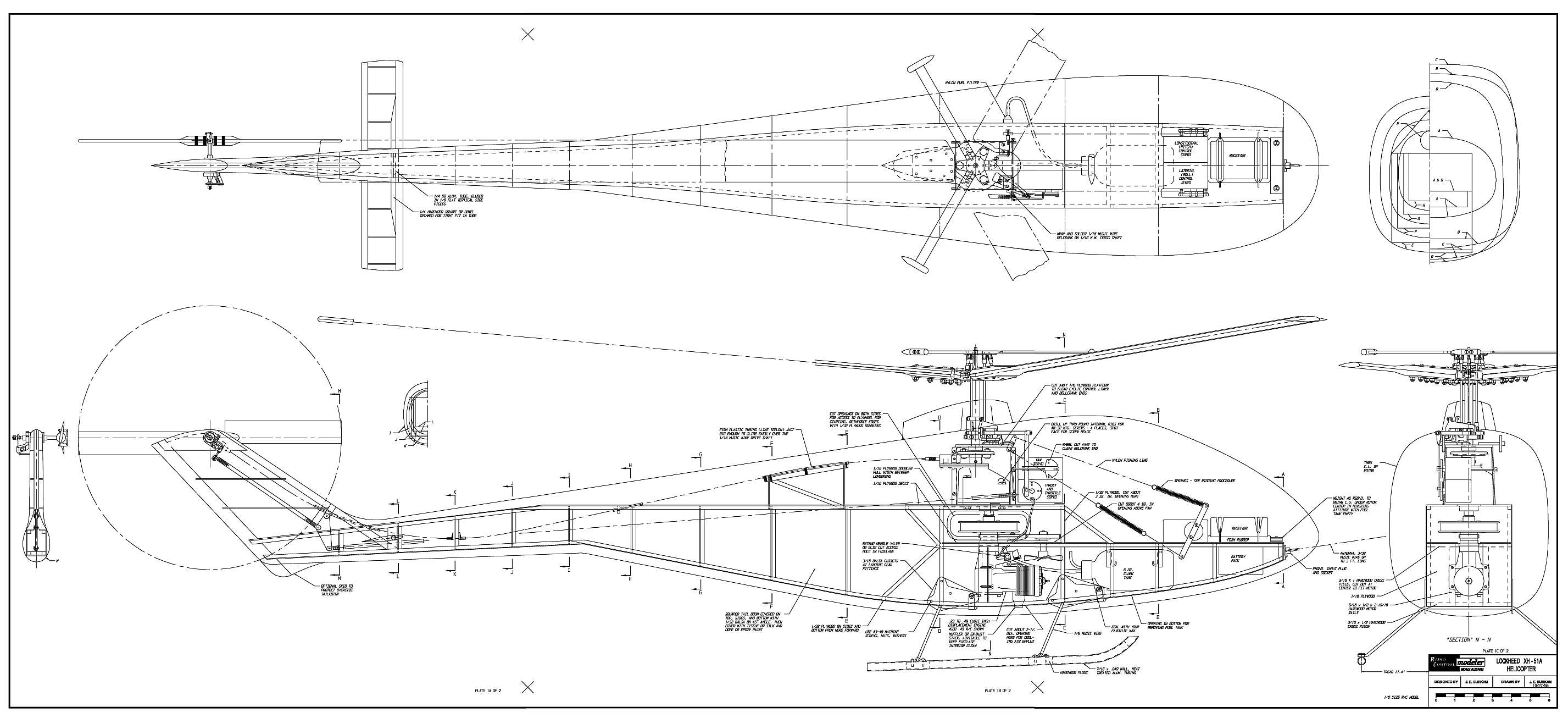
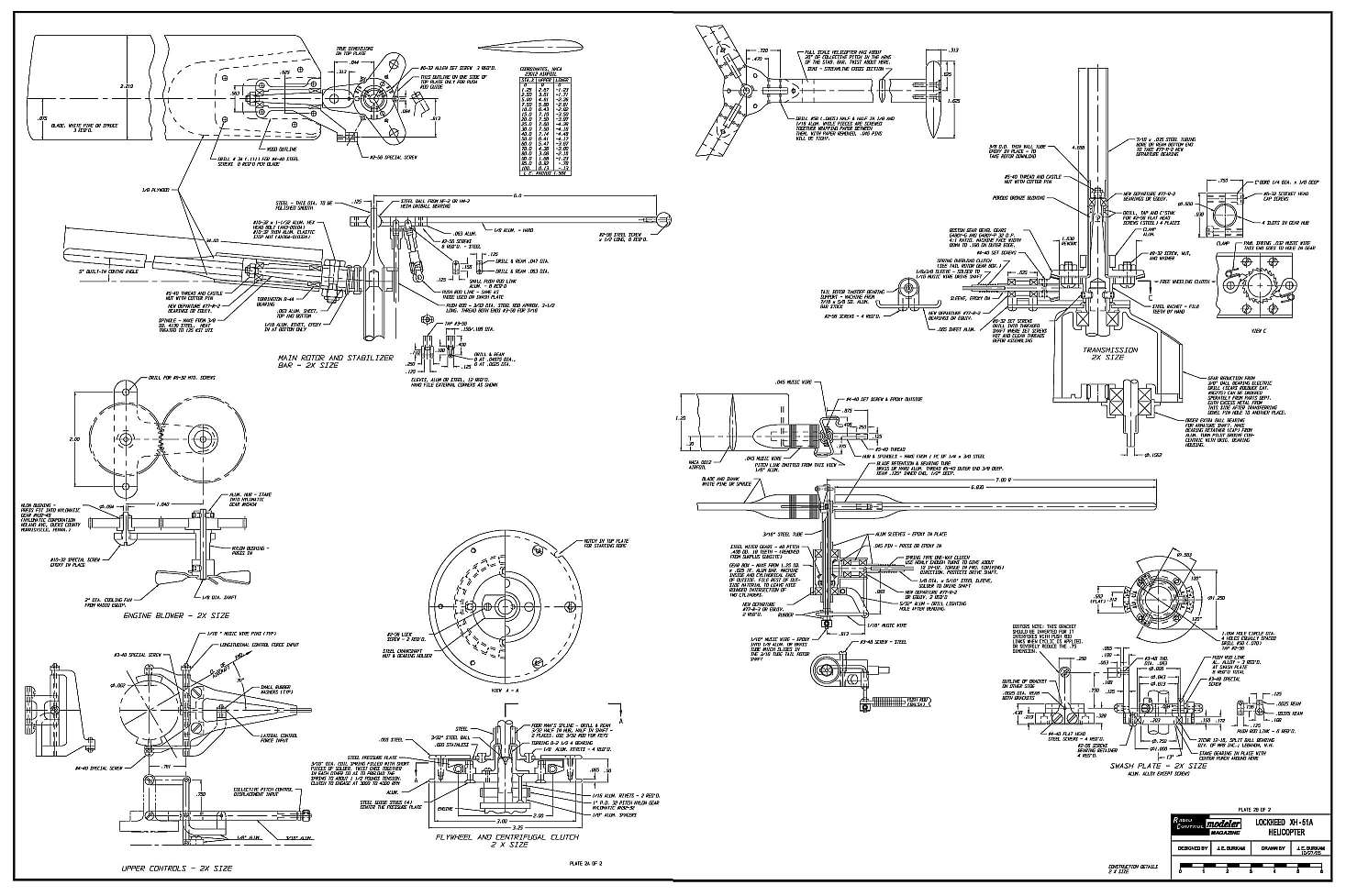
John Burkam XH-51A Construction drawings
This was the 'simplified' version from the original drawings and included 'rigid' rotors, full proportional radio control of all axis and Autorotation. It had a three blade rotor with diameter 70 inch's incorporating a three leg 'Lockheed' stabiliser. Power was from a Veco 45 and quoting theoretical value of 15 Lbs lift maximum; extremely well thought out but theoretical only.
The rigging and testing section is of interest in that it recommends testing the clutch assembly to prove it holds together and if it doesn't....???? make it again with more screws. The trimming section is also very interesting requiring someone to hold the model overhead when it is running in order to properly set up the phasing etc. Finally a very forward thinking note (even before actual success of an RC helicopter) that rigid rotors should be capable of inverted flight.
From watching the above video it is apparent that it was a very stable control system spawning the XH-51A and the 286, both of which flew very well. This system had proved a high level of control in 1958 so why did it prove so difficult to just add proportional radio equipment for full control. Again it would appear to have been because of the mechanical complexity required to complete the model and the ability to know how to set it up.
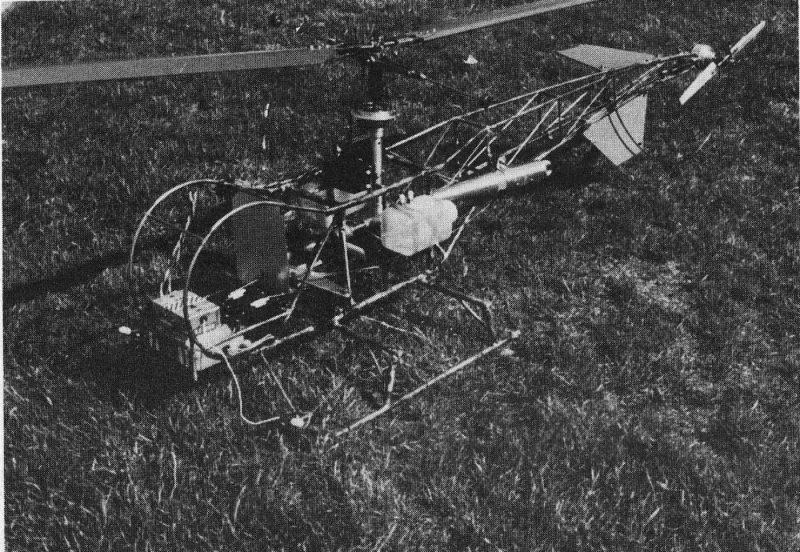
It would appear that at the time the XH-51A drawing were published, the challenge of building the model was not taken up (not even the designer???) though a few were later built and one specifically in 1968 by Gene Rock. Gene's own comments vindicates the conclusion above regarding mechanical complexity and the need to be an experienced machinist to achieve the necessary accuracy. The resulting vibration and lack of helicopter flying experience meant that the venture was not successful; no other info held on the other builders. From the specifications of later RC helicopters it would also appear the engine size was too optimistic and would have needed a '60' to achieve an actual figure of 15 Lbs lift. Due to scale effects would the rotor stabilisation system have actually resulted in a follow up rate that a human could control though I suspect if the gyro was made heavy enough it would? Rotor control speed was to prove a major stumbling block for others who did not use stabilisation (more on that later). To sum up, an excellent design incorporating many advanced features and a sign of things to come but it required skills that were generally not yet available to achieve successful flight so it was obviously not the answer; at that time anyway.
Practical Engineer - In Europe, Germany in particular, the approach was from the 'other' direction in adapting modelling techniques to solve the problems. Note that in the development of the RC helicopter in Germany there appeared to be about a 50/50 split between those who followed the contra-rotating 'free flight' layout and those who followed the 'single' rotor layout. Dieter followed the latter layout i.e. single main rotor, tail rotor for torque reaction control, cyclic control of the main blades with fixed pitch and throttle control for lift.
 Dieter Schlüter No1 helicopter
Dieter Schlüter No1 helicopter
The result of six months of trial but it worked, after a fashion with the model being stable but not particularly controllable. This lack of cyclic control was probably due to too much bell stabilisation and though a control input would have an initial effect on providing movement the 'bell' bar would damp it right down. There was also no control of the tail as it was just used as a 'test bed'.
1968 - A frustrating year
So, what progress was being made??? Dieter himself without realising it was heading towards over-complication by trying to address issues that at the 'model' level could be almost ignored. The same was apparent with other pioneers; having not quite got it right with the simple approach, they had been persuaded, or concluded, that more was better.
At this point and as so often is the case an event occurred that was to both frustrate and stimulate the helicopter pioneers. In order to promote development the German radio manufacturer Simprop Electronic and Ikarus of Harsewinkel were 'persuaded' to run a competition with a cash prize for the best helicopter and so in September 1968 at Harsewinkel the first ever helicopter 'fly-in' was held. The event itself was a success but as a flying demonstration a 'flop' and it highlighted that quite a distance was still to go before controllable model helicopter flight was likely to be achieved.
At this point it will be worth taking a small look at what radio equipment and engines would be available to experimenters.
Radio Control Equipment
As will be seen in later years it is possible to achieve 'helicopter' type flight using only three and two functions but this was generally not considered by the pioneers (though a couple did try). Because they were after emulation of full size capability, four channel proportional control radio would be required so this is considered as the minimum when reviewing radio equipment.
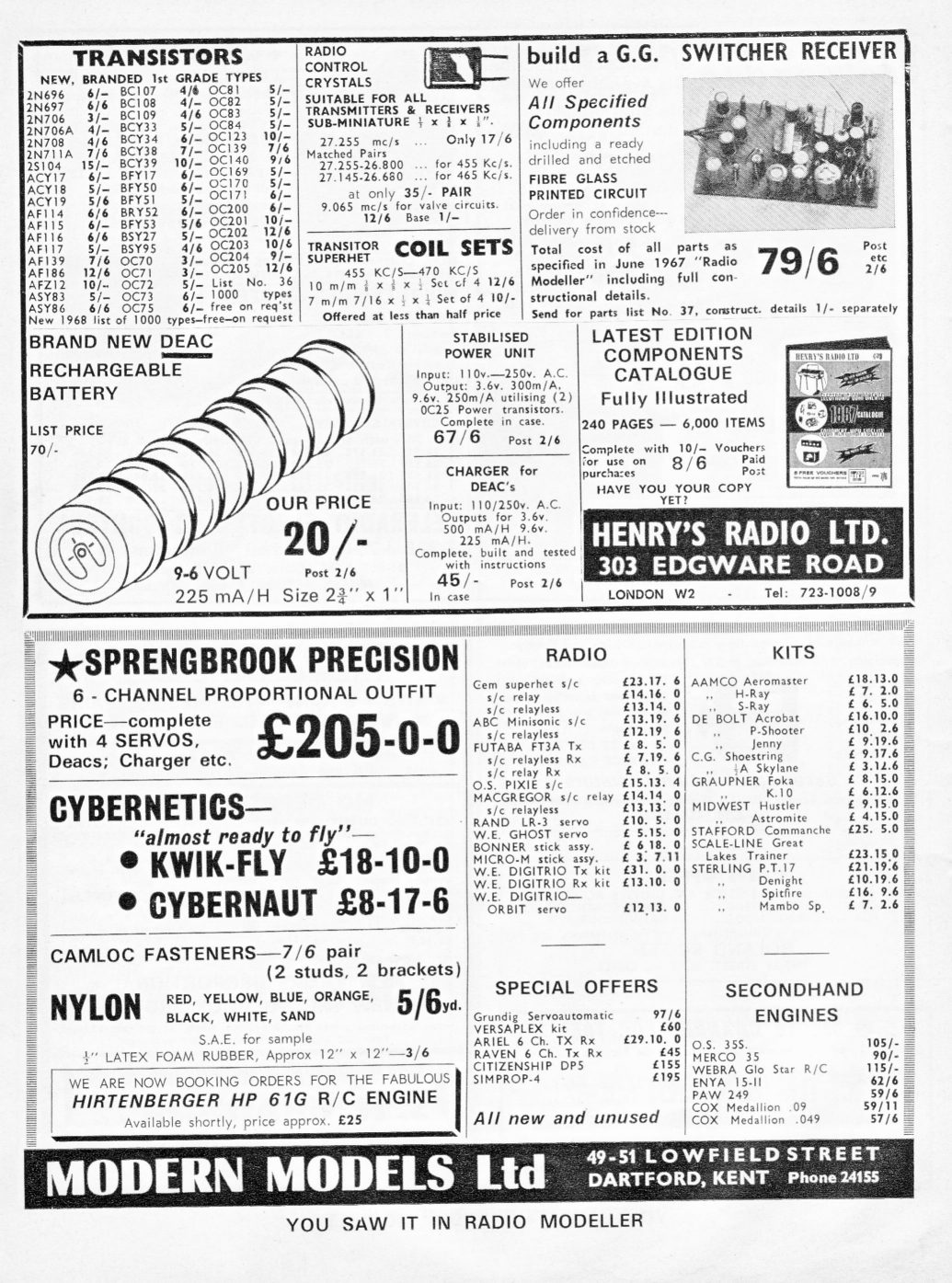
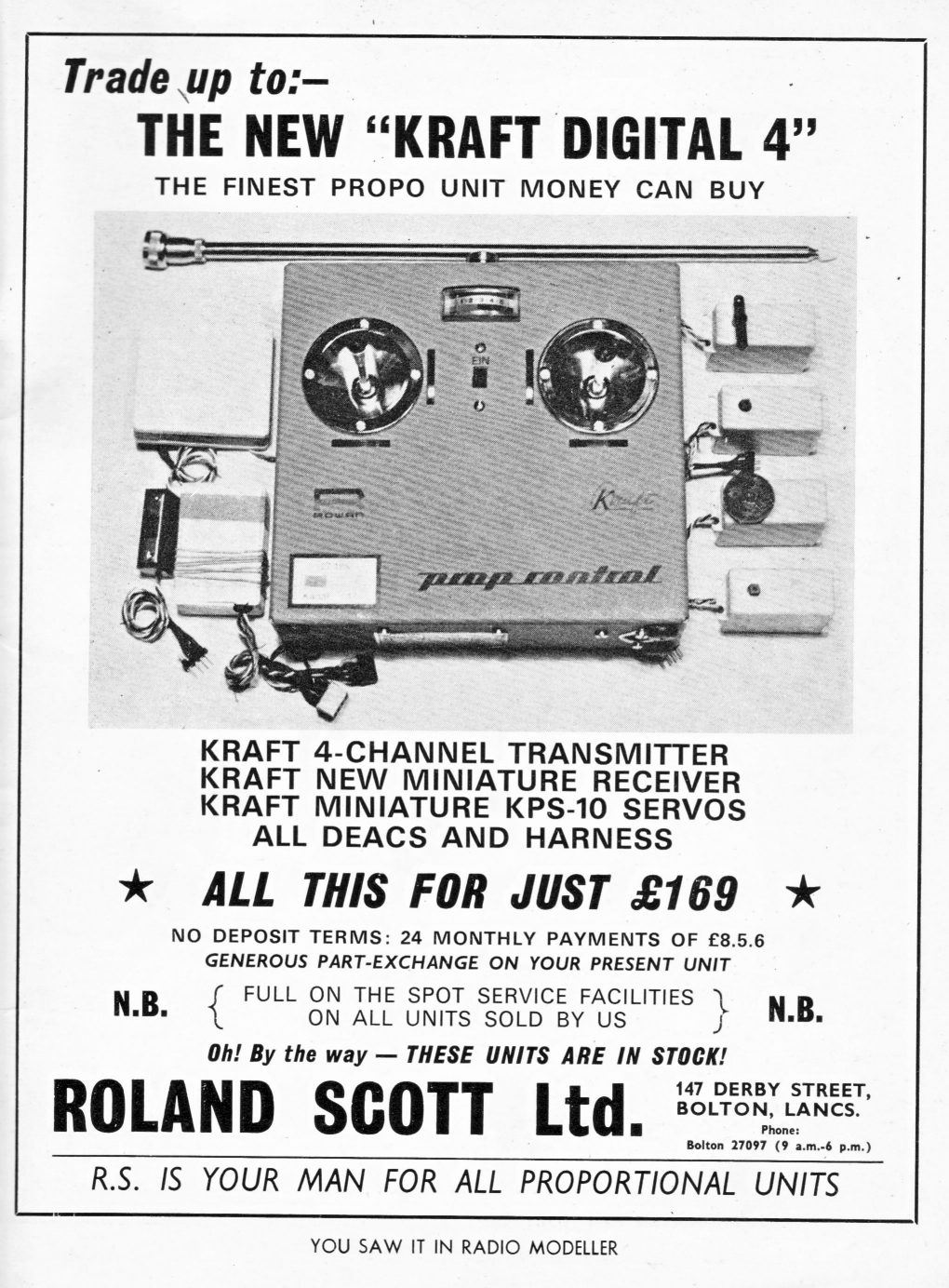
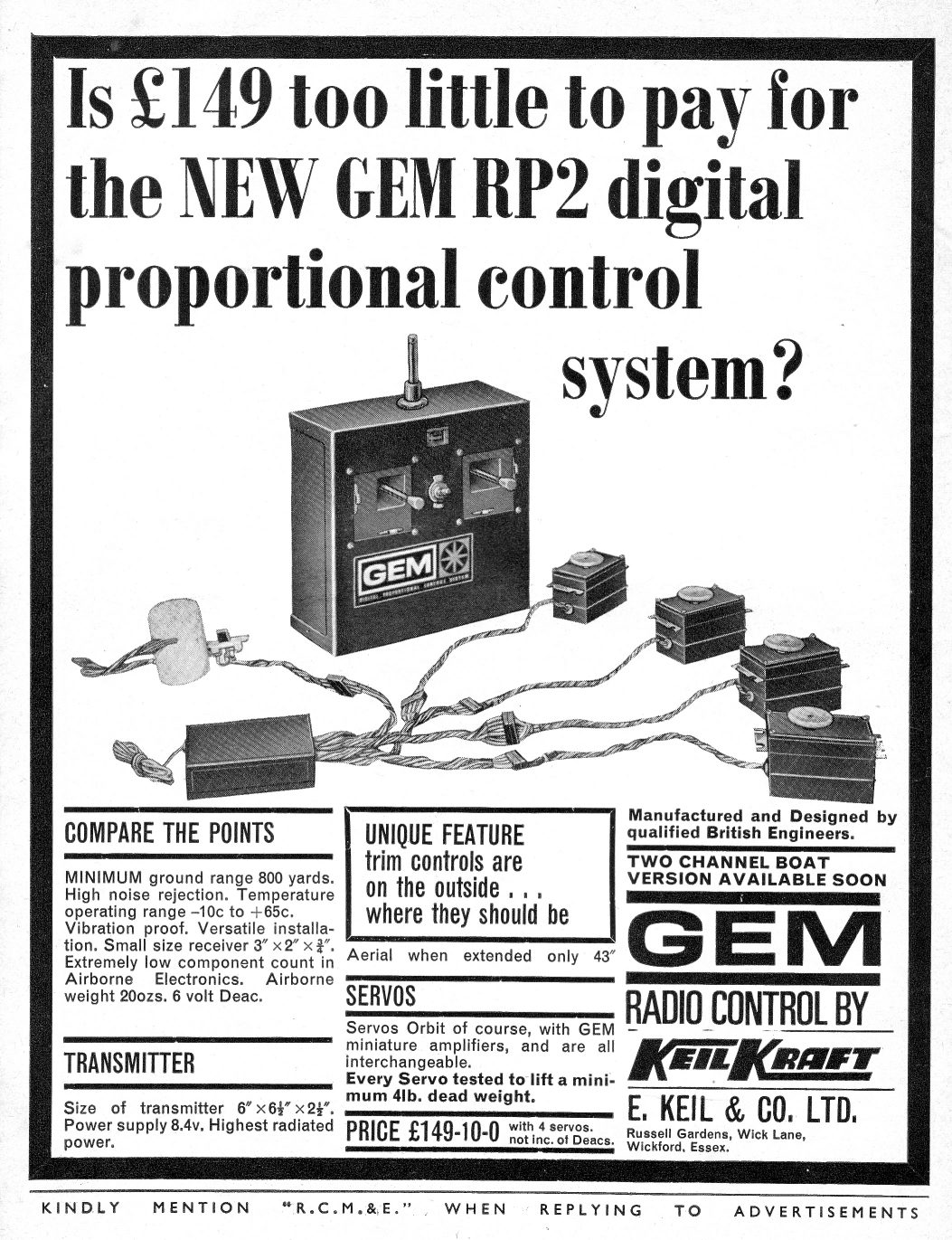
It is worth having a look at the available radio 'gear' of the late sixties to get an idea of what was available to those carrying out the experimentation.
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
UK magazine adverts 68-69
As you can see there are many manufacturers offering 4 channel plus proportional radio control sets. Additionally, building your own was also popular as it was much cheaper than ready made and the electronics of the day only required reasonable soldering techniques to achieve reliable results.
Note that even the 'top of the range' sets were very basic compared to those that would be available only a few years later; mechanical trims with either switches or sliders for auxiliaries being the only additional features. You will see as time progresses, radio equipment development generally 'lagged' aircraft development with a clear need being identified before a manufacturer would provide the facility. This is a fairly obvious demand and supply scenario though occasionally a radio development was made before the need identified (at least in practical terms) however, these tended to be more for increasing sales with some of the features more 'gimmicks' that actually needed functions.
See radio section for details and specifications of radio gear.
Glow Engines
Fixed wing aircraft can fly with as little as 25% horizontal thrust to weight as large slow flying 'wings' are reasonably efficient; obviously the more power above this minimum requirement resulted in a higher top speed and/or increased climb rate. Helicopters however need at least 100% thrust to weight so with rotors that are not as efficient as 'wings' plus large power losses in the gearing and the tail rotor drive meant that a powerful engine would needed if it was going to prove possible to lift off and actually fly. Whilst radio gear had reached the required specification for success, engines on the other hand were to be 'borderline' for power output for many years to come. Total helicopter weight would therefore always be a 'battle' especially given that light weight radio gear and helicopter specific equipment was still many years away (i.e. demand providing the need before availability). The engines with the best power to weight ratio at the time were the '60' size due to being dominant in fixed wing circles and therefore had the benefit of a more focussed manufacturer development. Many of the first development helicopters were designed for this size of engine in order not to have too big a battle in the power to weight game. Note that I said 'many', those coming at the idea from a general modelling point of view using more traditional building materials tended to use smaller engines as they could build lighter helicopters. Examples of this approach would be the Du-Bro Whirlybird 505 and the Micro-Mold Lark.

Webra, Veco, Super Tigre, OS, Merco, were all popular manufacturers in the late sixties and all had reasonably powerful 60 size two stroke engines.
In summary, the radio equipment of the day had the required specification to achieve simultaneous proportional control of all four flight directions plus engines developed the power required to achieve vertical take off so.
1969 - A light at the tunnels end.
As could be seen from the reports of Harsewinkel in 1968, quite a number of experimental models had been produced in Germany alone and other modellers were beginning to get results around the world.
In the UK John Drake, an Engineer and Modeller had been experimenting to get an idea of power requirements etc and following on from this had built a rig to put them into practice. Like Dieter, he had a 'need' to do something different with an introduction below in his own words from the book release in 1977:
MY INTEREST in Helicopters goes back more years than I care to remember. Even when I was in my early teens I made a rubber powered autogyro. Although this would autorotate quite readily when dropped from a bedroom window it would persist in rolling over with any attempt at horizontal flight. At that tender age I was baffled by the model's behaviour but that experience has haunted me ever since. Although I have been an ardent aeromodeller ever since my school days I have had a yearning to tackle a mechanical project such as a model locomotive. The idea of a helicopter provided the challenge which happily combined both aeromodelling and machining interests.
I remember attending a lecture on full sized helicopter development where the speaker's opening remarks were: 'A Helicopter is a mechanical engineer's dream but an aerodynamicist's nightmare'
Need I say more??
I should say at the outset that most model aircraft design is based on, "if it looks right it is right". This philosophy is fine but it is really the result of what we have been accustomed to seeing. However, when there isn't any experience on which to base our seeing judgement, it is better to do a few sums then carry out an experiment to verify the calculations rather than to make a large number of fruitless tests not really understanding the problem.
John Drake carried out a number of experiments with electric drills and rotors to determine lift from various blades etc and then designed himself a test rig. This allowed him to concentrate on head design, lift and tail balance before having to focus on the head control.


His first rotor head incorporated flapping hinges, lead - lag, etc just like all the books said was required. It was though unstable with the blades 'flapping' up and down in an uncontrolled manner due to ground effect. He then carried out more research and came upon the 'Hiller' control system as noted for 'small' helicopters; though small meant the authors original prototypes which whilst not being 'model' small would perhaps be more suitable; so another experimenter had started down the 'right' path.
Over in the USA a number of modellers were beginning to have similar results (NOTE info still lacking??????). John Burkam at the twelfth annual DC/RC symposium in May 1969 gave a lecture on RC helicopters and rotor design plus flying one of his 'free flight' helicopters in the auditorium. John had with him his radio controlled helicopter "Super Suzie" which weighed a little over two pounds and was powered by a Cox Tee Dee 049 glow engine. It had a 3 foot diameter, 3 blade main rotor with collective pitch and spring precessed 'Lockheed' gyro, utilised Bonner 4RS radio equipment as that was the smallest available at the time plus a miniature mechanical rate gyro for tail rotor stabilisation (needed with collective pitch??). reported not to have a clutch so once the engine was running then it kept going until it ran out of fuel. Ray Jaworski (???) also had his helicopter (no details held??) and at the meeting both were persuaded to try for a 'world' record. Despite the bad weather, John managed a near 6 second flight with his; this was witnessed by a number of people, Horace Hagen being one of them so it was submitted and accepted by the AMA then the FAI for the first helicopter duration.



His design was very advanced, especially the mechanical yaw rate gyro fitted to the tail rotor; note that the strange looking configuration was due to his design also having a forward boom that helped balance the heavy tail rotor assembly and also allowed the receiver aerial to be lead well away from the rest of the machine thus removing electrical interference.
Over the years there has been much debate about this record and it is generally 'dismissed' as not meaningful. John himself in later years tacitly acknowledges this and even admits he could not fly a RC helicopter and was thus 'pressured' into doing it; therefore the record was just a hop in the air, fight it for as long as possible, then down again (he was not to properly learn to fly until summer 1971). Horace Hagen in his Biography also states that it was not considered as 'controlled' however, it was a start and as the record was JUST for duration and as it was a helicopter and had stayed in the air (control was only implied and not necessarily mandatory!!!!) and anyway nobody had claimed it then; so it stands as valid.
As a historical note the question must be asked given John Burkam's design of 1965 and what would appear to be a fully controllable helicopter built by early 1969, why was it up to Dave Grey with an altogether 'cruder' (or perhaps a better word would be - simpler) layout to be the first successful US RC helicopter? A large part of the answer is possibly John's character as even his friends will acknowledge he was 'difficult' at times and it would appear that John did not initially have the 'patience' to learn plus he built his models for himself and as a means to an end. His much later article and the title gives it away "Role of the RC Helicopter Model in Engineering" highlighting this aspect and it was his 'junior' partner, Gene Rock who seemed to be the driving force from the modellers perspective.
In Germany, by early 1969 Dieter had followed up two different concepts and was developing a twin 'side by side' model but still without complete success. He had gone through very highly complicated single rotor designs which included a gyro for tail control but he still had not succeeded. In order to find out what others had managed to do he organised another 'meeting' this time at Saffig. As can be seen, except for Dieter's model, the general concept of a single rotor had been accepted; it is interesting to note that FW Biesterfeld with his 'Huey' also attended and had obviously made little progress since Harsewinkel the previous year.
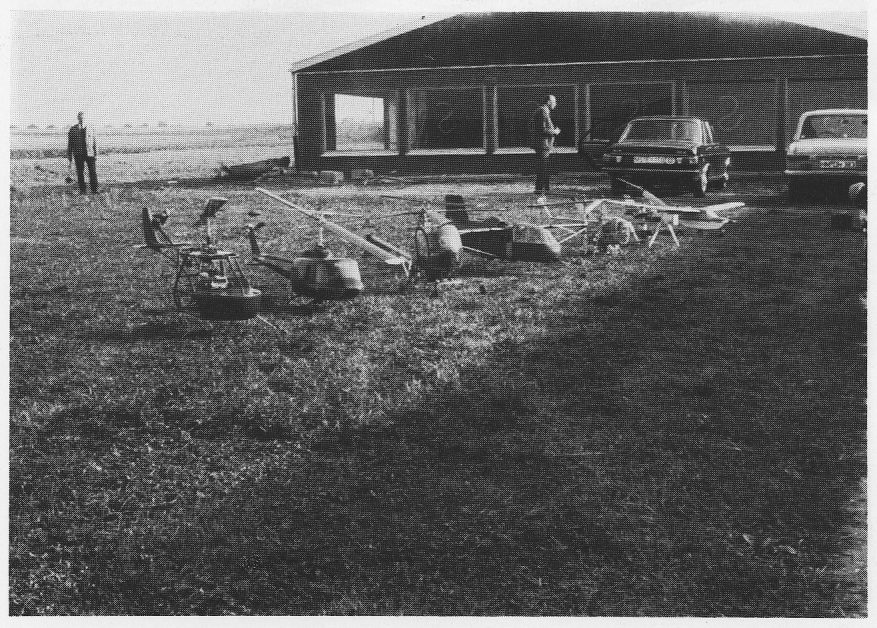 Saffig 1979
Saffig 1979
Though it was useful to know what was not possible it appears the lack of any real progress once more spurred Dieter on and he changed direction once again and back to a single rotor configuration. After this change he finally had the breakthrough using the Hiller control configuration and although this appeared to work, a bad crash showed it was not quite right. However, with the solution to this problem solved, the close of 1969 gave the prospect of success finally within reach.
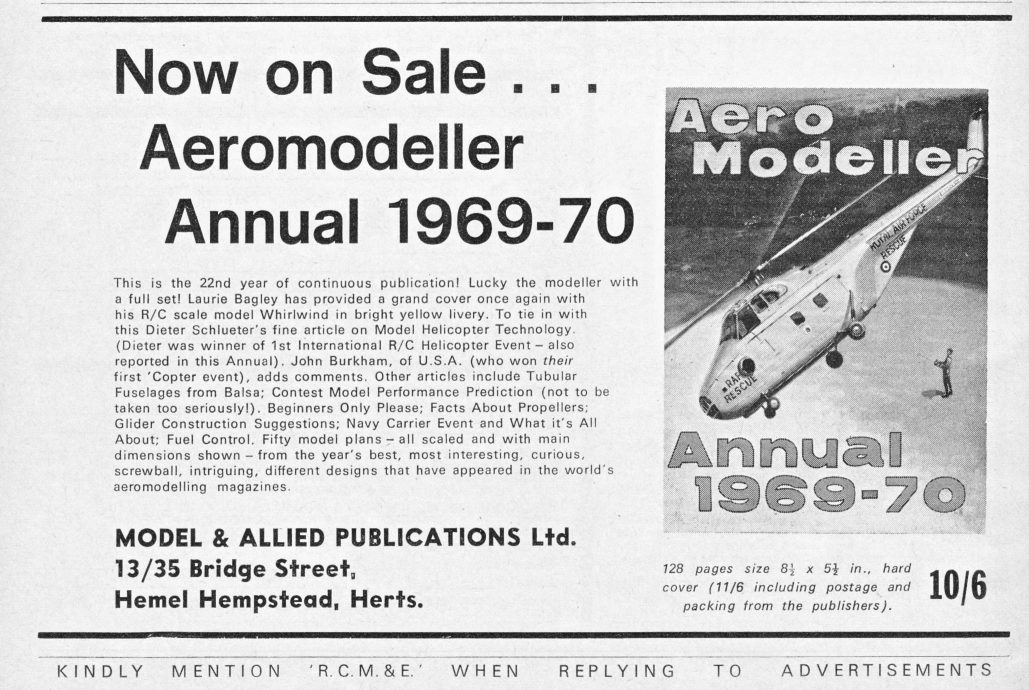
Of note is the UK Aero modeller annual for 1969-70 with the front cover showing a picture of a radio controlled Whirlwind by Laurie Bagley; implied is that it was functional; though history would show (by a lack of any further reference to the model) this was not the case. Additionally it is noted that articles covered Dieters win of Harsewinkel in 68 and also that John Burkam won the first US helicopter event; assumption here is that it refers to the endurance flight which in itself was not an 'organised' event.