![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
|
|
|
|
Vintage RC Helicopters - RC helicopters 1968 Harsewinkel
Harsewinkel 14-15 September 1969
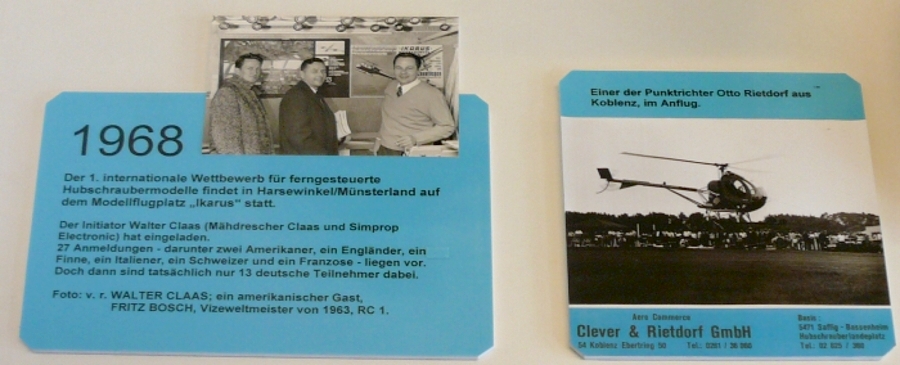
Organised by Mr Walter Class (owner of Simprop Electronic) and Ikarus of Harsewinkel, the event attracted 13 entries eager to display their machines. The original format had a flying section that required control of the helicopter to be demonstrated however, it was apparent that development was not at a level to achieve this and so a basic 'will it fly' demonstration was only required. Cash prizes and full size helicopter flights were part of the incentive for the event. Prior to Harsewinkel there were two distinct lines of development; co-axial and single rotor. Co-Axial
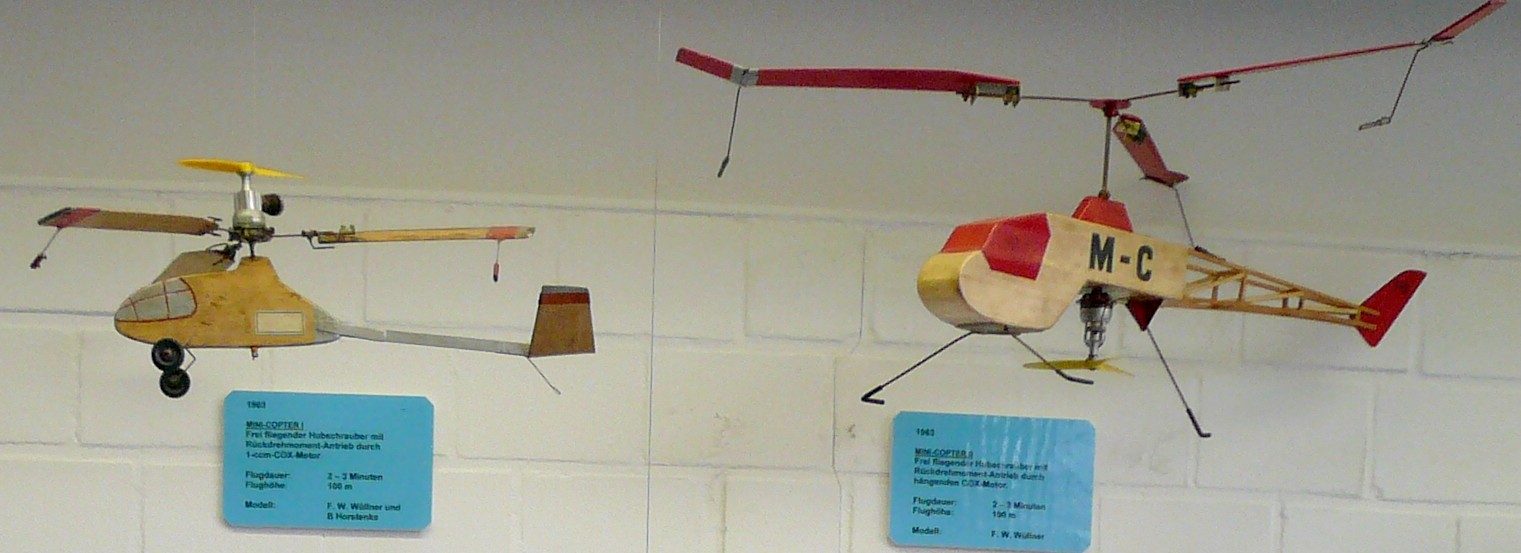
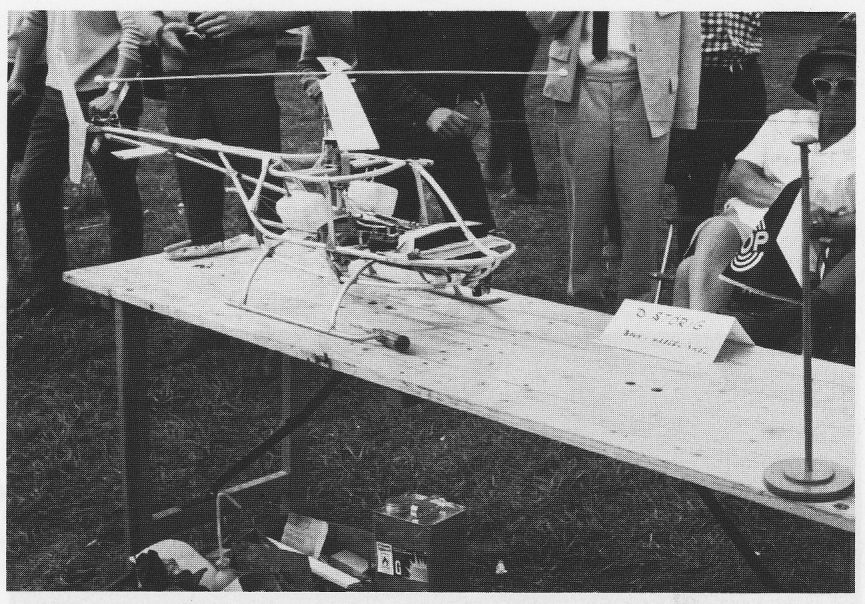
It was noted in the meeting that the co-axial system had a large following; this layout had been used successfully for 'free flight' models and so was the 'logical' basis for radio control. The engine with a normal aero propeller was bolted onto a set of main blades that could freely rotate on top of the models body. With the engine running the, 'Torque reaction' rotated the main blades in the opposite direction to the propeller and because of the ability of the main blades to rotate freely no torque is transmitted to the body so it does not rotate. The model would then rise vertically under power from the engine and when the fuel was used up and the engine stopped, it would carry out an 'autorotation' decent; the lightness of the model (and the 'spring' in the plastic landing gear of the model shown above) would prevent any damage from being inflicted on returning to the ground. The CG (Centre of Gravity) of the model was adjusted by adding weights to the nose in order to control the forward motion of the helicopter and the more weight added i.e. forward CG; the faster it would 'fly' in that direction. Thus it could be flown in a wind by balancing forward speed to wind speed and of course, pointing it upwind. If it did get blown around by a gust then the modeller had to quickly run after it, flying could be linked to exercise....... So, using 'rotor speed' with fixed pitch main blades for greater efficiency and 'height' control coupled with some form of rotor control and it should work .....!!!!
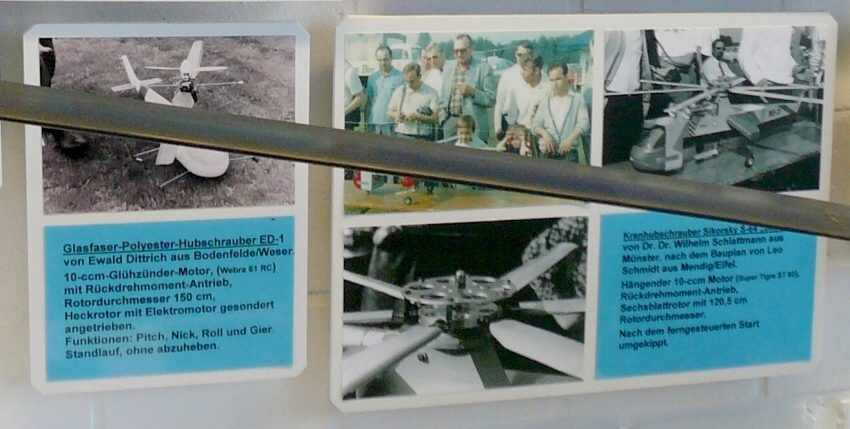
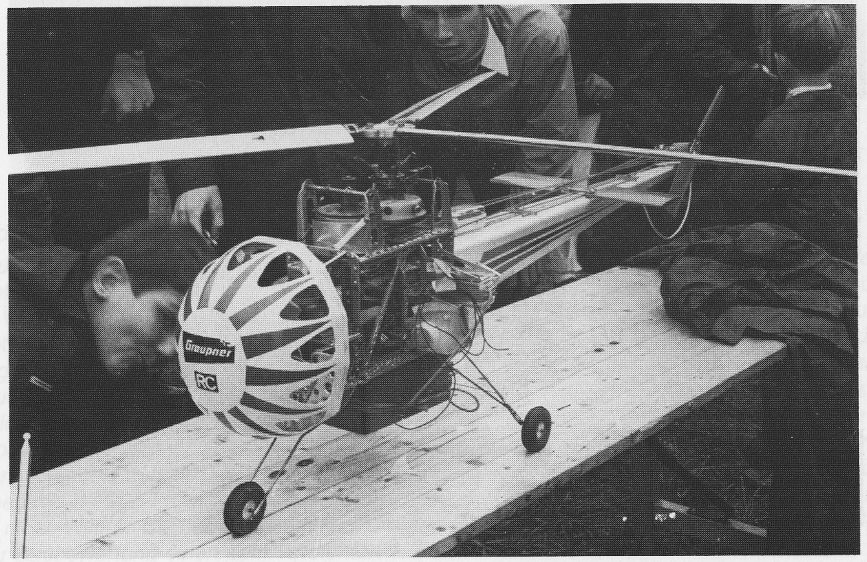
Fibreglass fuselage with fins and tail surfaces to give a semi-scale look though not quite sure how control was to be effected as it utilised non-proportional radio equipment, used 'weight shift' to move the complete rotor head assembly and did not have a tail rotor. Unfortunately lacked the thrust required to achieve flight though did 'hop' for a short while and thus achieved second place for flight evaluation.
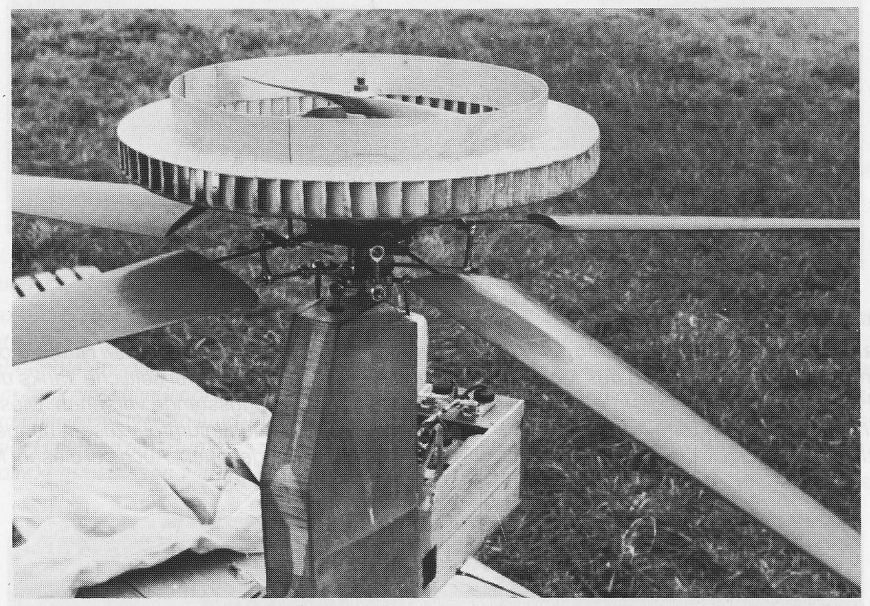
In an attempt for more lift, the propeller blew through an air turbine connected to the main blades. As well as torque reaction from the motor, the main blade rotation was also assisted by air being deflected by the turbine. Directional control appears to be by direct cyclic operation of the main blades. This model also lacked the thrust to achieve flight.
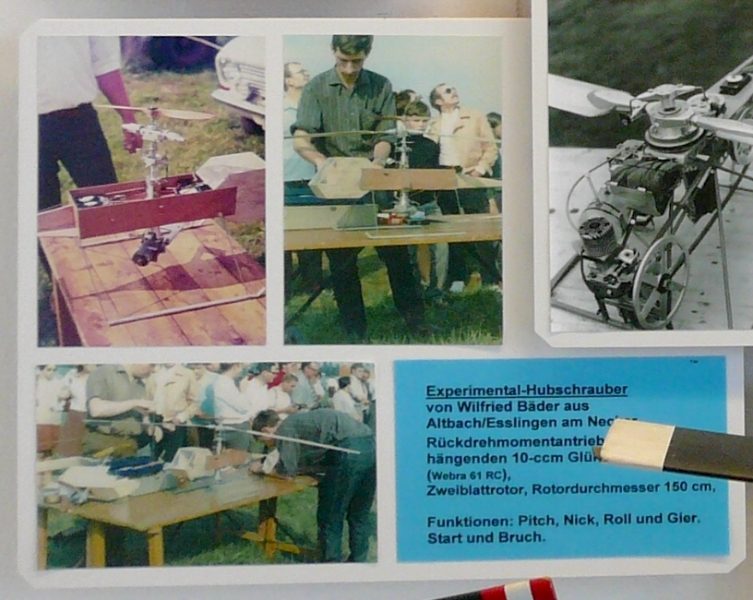
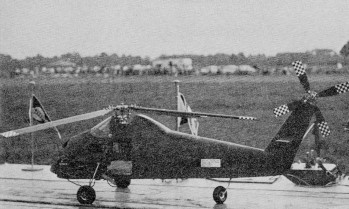
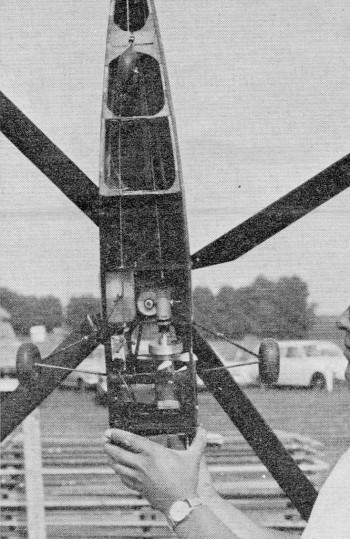
A variation on theme with the engine below the model pointing downwards and suspended on a hollow main rotor shaft which supplied fuel to the engine from two external tanks. The main rotor had two fixed pitch blades and 'Bell' control was effected by swashplate operation of the stabiliser bar. It also included a driven tail rotor so that rotation control could be achieved and was built from aluminium tubing giving the external shape of a JetRanger. Again, this model lacked the thrust required for flight.
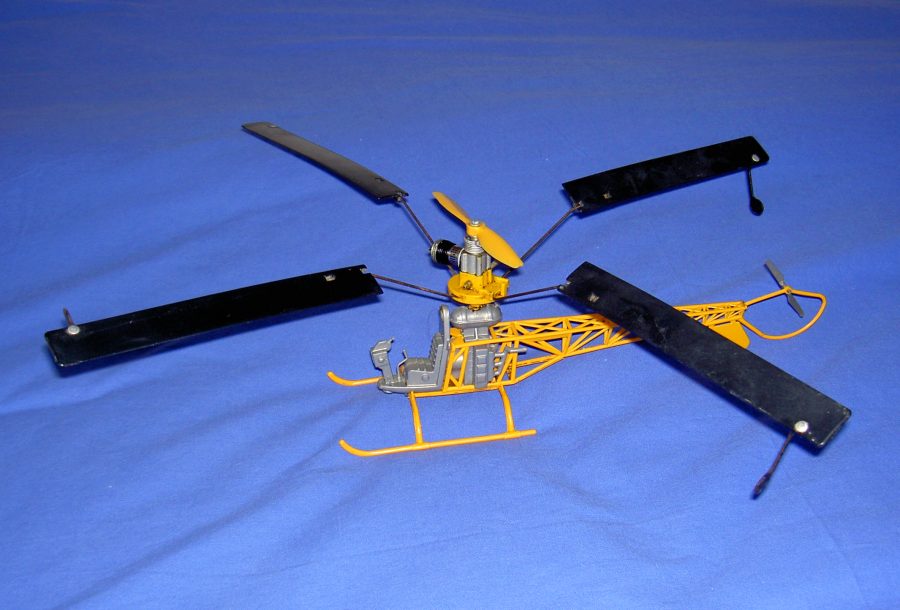
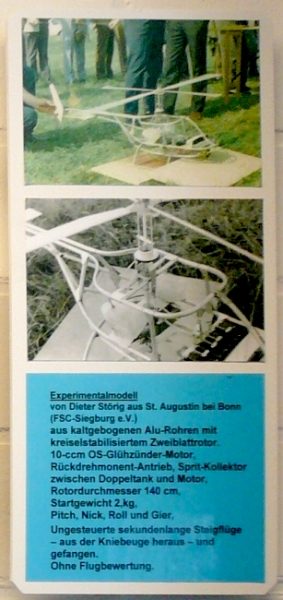
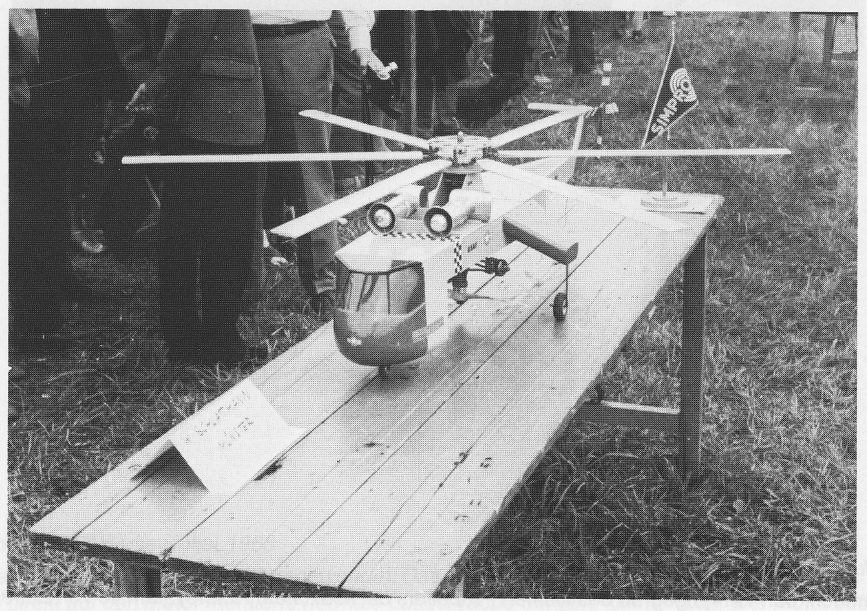
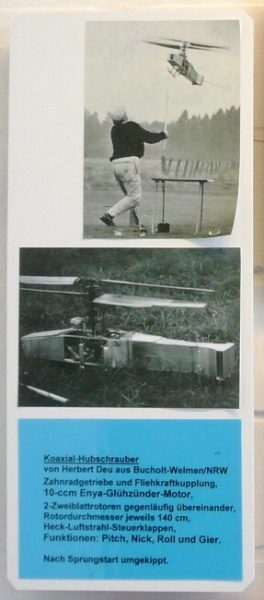
The 'Skylift' had a similar layout to the 'JetRanger' except that the six main blades were directly controlled from the swashplate without any form of stabilisation. Ran with a fixed engine speed and collective control on the main blades. The second model however had been designed to have two sets of rotating blades thereby removing the use of an 'inefficient' aeroplane propeller. For increased power (and rotating balance) two identical engines were used, being connected by a reduction gearbox which was necessary in order to run the engine at its best speed without 'over revving' the main blades. Layout though was similar in that the top blades were driven from the gearbox output shaft and the bottom blades complete with engines, fuel tank etc the rotated by torque reaction. Thrust was controlled by varying the main blade pitch (collective) and directional control was by 'tilting' the rotor. Finally heading could be changed by 'twisting' the fin in the rotor downwash thereby imparting a rotating force to the fuselage. No flight comments available but I suspect that as per the previous models, both lacked the thrust necessary for flight.
As can be seen, the co-axial layout had been favoured by a number of the entrants which showed quite logical thinking. The free flight layout was successful and so if engine speed could be varied, height could be controlled then all that remained would be a method of controlling direction. From the various models submitted this later aspect was approached from a number of directions from direct cyclic control to rotor tilt however none of the control systems could be proved. There were two reasons for this: either a lack of the required thrust necessary to 'take off' and/or they were unstable and turned over as they powered up; the latter problem very apparent with the engine pointing down. In hindsight this layout would always be problematic as the thrust was below the centre of gravity (CG) and not above it so the helicopter would be unstable; like trying to balance a long pole vertically upwards on your hand instead of holding from the top which is stable. On the thrust consideration, perhaps more to the point and coming at it from a different perspective; all were too heavy for the available thrust. This was again another example of over-engineering a solution and because the single rotor layout proved to have the required thrust, the coaxial layout 'from the German view, was considered a dead end. As an historic note, in the USA the co-axial approach was also experimented with and this time weight was considered the enemy right from the off resulting in the first successful American helicopter the Whirlybird 505. Perhaps if Ewald Dittrich had actively pursued this layout with a view to weight reduction, he too might have had some success. Single Rotor This layout had already been proved viable in regards to providing the necessary lift for flight, unfortunately it was after this point that the solutions to the problems with directional control had so far proved to be elusive.
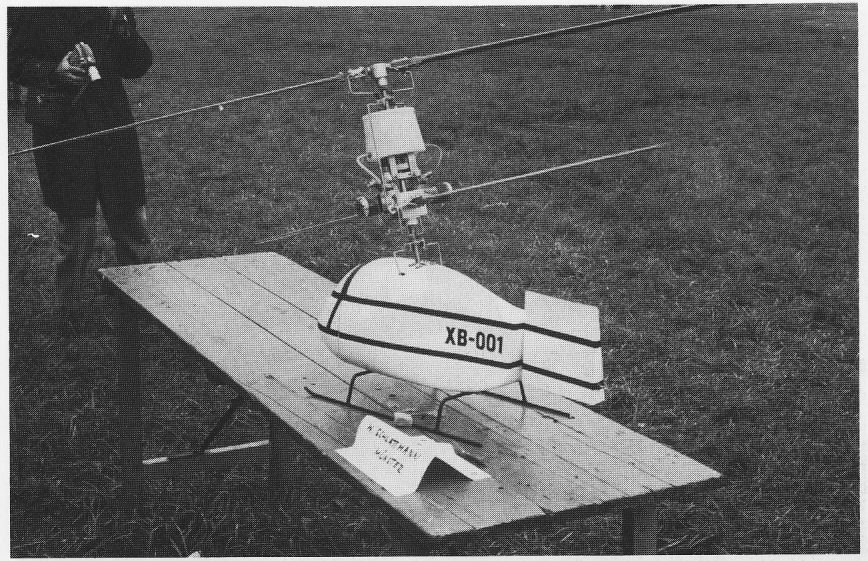
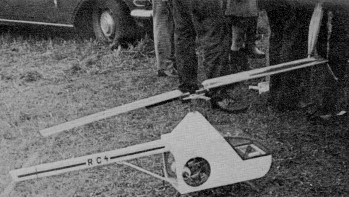
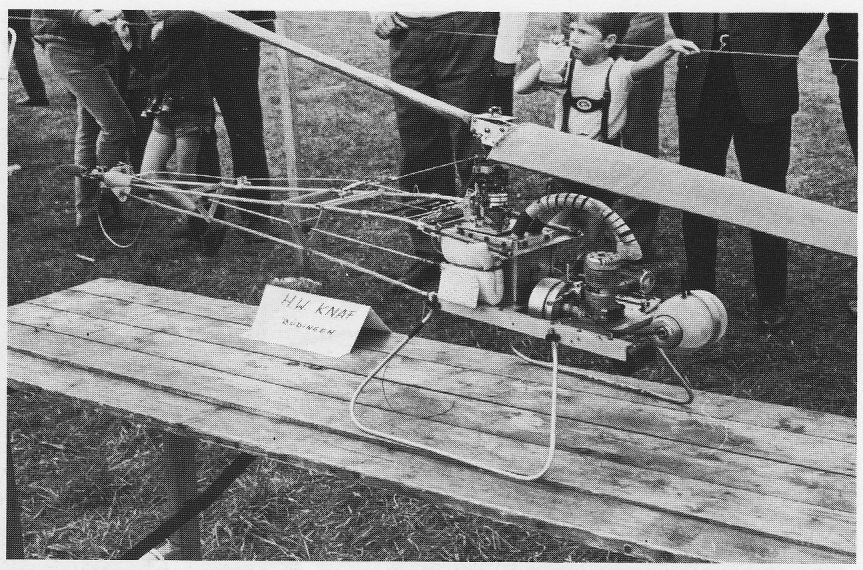
Three axis control, fixed pitch with throttle and tail control for rotation. No cyclic control of the main blades as the model was 'balanced' for the hover with CG shift control for fore and aft movement. Required calm conditions as it had no left-right roll capability thus had to be 'steered' by tail rotor and forward movement giving it limited hover capability.
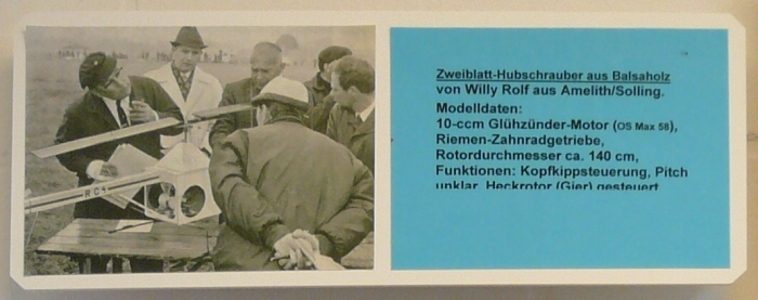
Two main blades directly controlled providing both collective pitch and head-tilt control. A complicated drive system with a two stage 'Vee' belt reduction and the clutch function provided by a crank system which placed the first belt under tension once the engine was running.
Another very complicated (read heavy) model with a three blade head that could tilt on all direction plus collective control. 'Vee' belt drive with centrifugal clutch, full metal chassis with belt driven tail rotor and movable tailplane. Again had a Super Tigre 60 motor with a weight of 4.7 Kg.
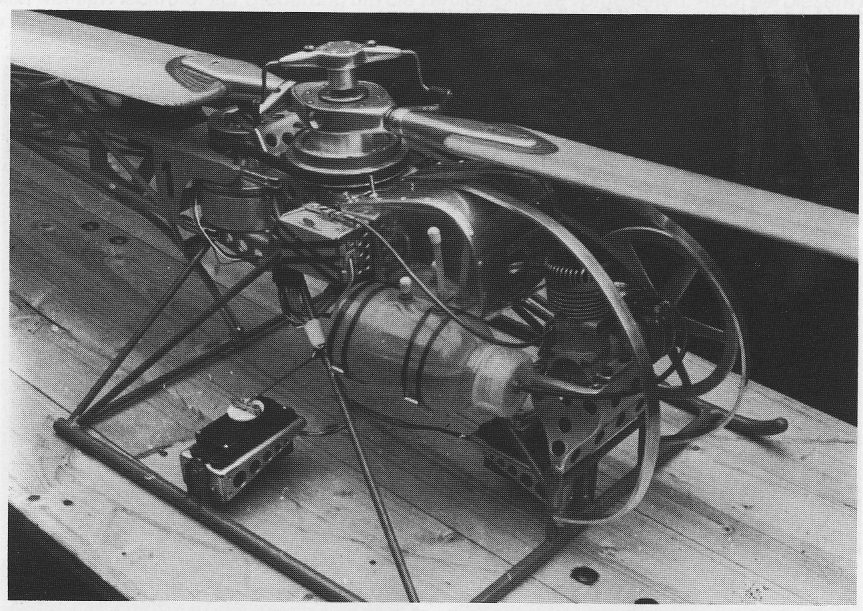
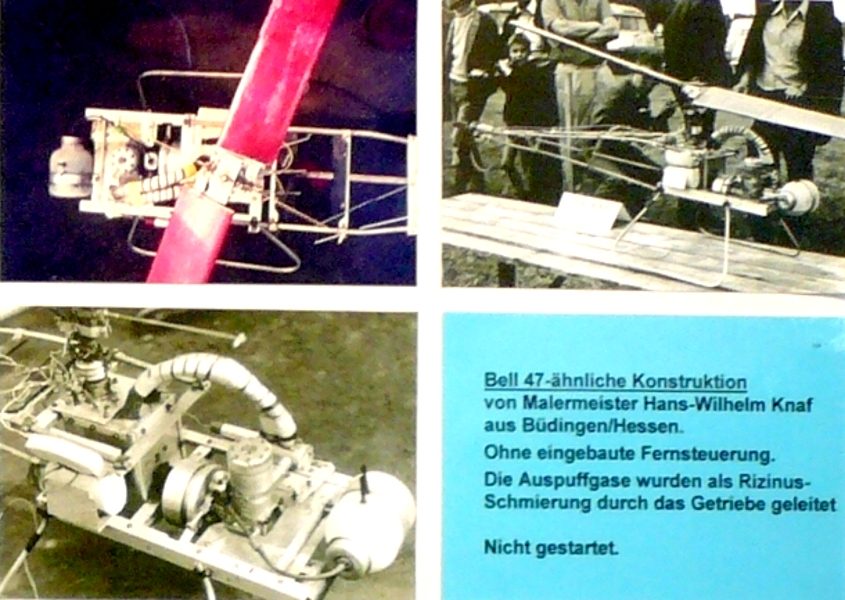
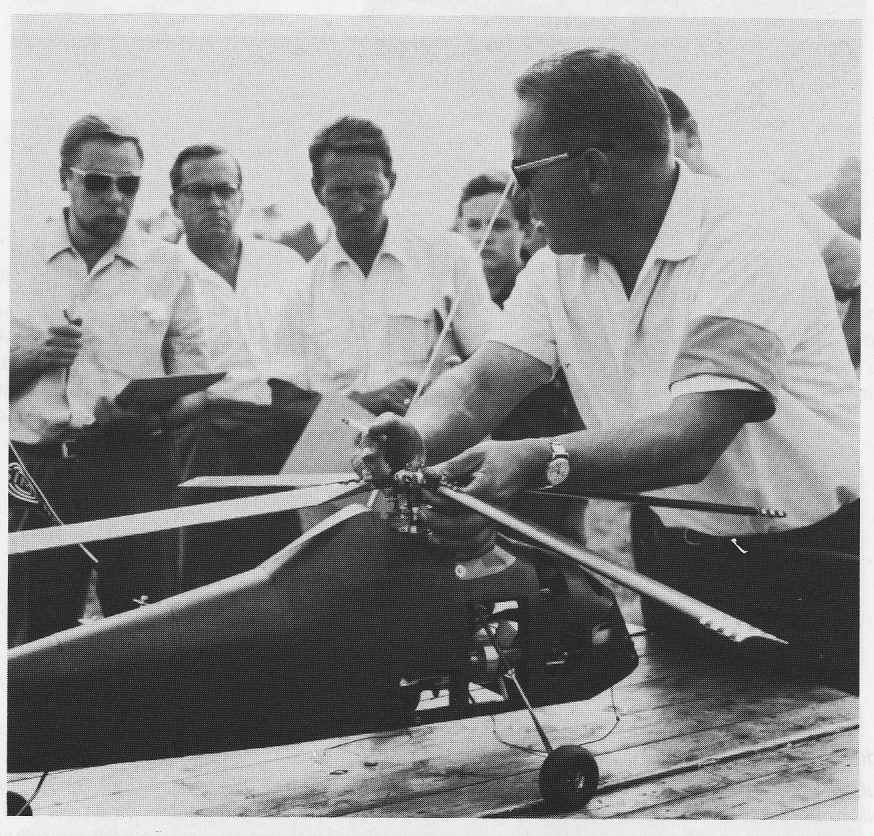
This model incorporated a geared reduction drive and also a novel feature in that the exhaust from the engine was diverted through the gearbox thus allowing the unburnt castor oil to lubricate the gears. It has a swivelling, teetering and self-stabilizing rotor and though did not fly at the meet was reported to have been previously test flown, though no report on the success, or otherwise.
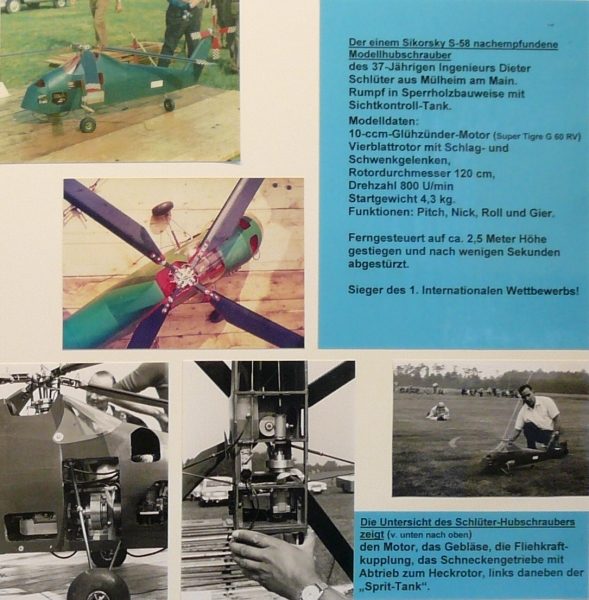
Multi-blade head with collective and cyclic pitch incorporating flapping, lead-lag blade hinges with dampers, four blade tail rotor, autorotation, etc, etc.
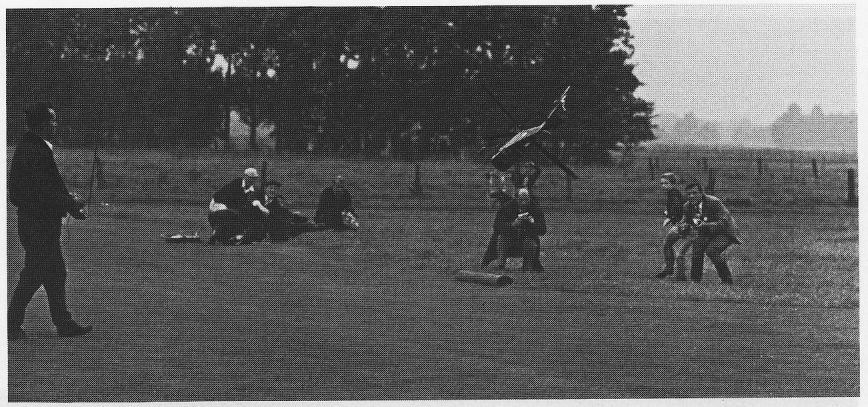
The actual flight trial of this model is presented in Dieter's own words; With two 'flights' of about 4-5 seconds duration, and a height of about 3-4m, /gained first place at this first helicopter competition (static judging 2nd place). Of course, you could not really call this 'flying' in the full sense of the word. It would be closer to the truth to call them the desperate attempts to avoid a crash immediately after take-off, by applying a few more or less correct control commands. The most l achieved in these 'hops' was to scare away the photographers who had come very close. Nevertheless, the promoters Simprop Electronic and Ikarus of Harsewinkel -fulfilled their end of the bargain and paid out cash prizes amounting to 9050 DM to the 12 active participants. The helicopter firm of Clever and Rietdorf also treated all the entrants to a total of 19 flying hours in a full-size helicopter-at a cost of 4750 Dm.
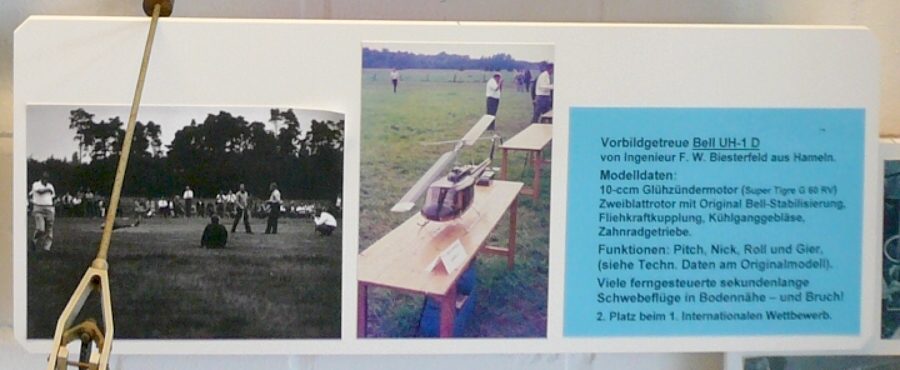
Scale model of the Bell UH-1D. Powered by a 10cc engine, the two blade head incorporated 'Bell' stabilisation with collective and cyclic pitch control. Main rotor blades where made from thin ply and were 'hollow' with steel wire in the leading edge in order to achieve the correct CG. The model was very stable, achieving a number of successful hovering flights however, the transition to forward flight had not yet been successful. Wilfried therefore gained second place in the flying and first place in 'static' judging. First helicopter competition - Translation by John Burkam of Dieter Schlüter's report in the October 68 issue of the German magazine MODELL Model helicopter technology - Dieters own report and comments on helicopters control with details of John Burkam's model along with his additional comments. Below is a reproduction of the report by Jack L Schlecht that appeared in American Aircraft Modeler March 69 edition.
First model R/C helicopter competition in Germany had one successful flight but
20 stomping, sputtering, crazy-crashing attempts, yet each model was an
ingeniously crafted masterpiece. You get the impression that Jack considered the occasion somewhat 'humorous' though he does again bring up a valid point that there appeared to be no US interest in this rapidly developing area of Radio Control. As an additional piece of historic luck, a film of the event survived through the years and had been converted into a digital format and is available on U tube. This shows well the flight problems being experienced and of special interest is the training aid (fishing pole - 'Angel') used by dieter and the apparent 'fearlessness' of the operator. I will admit that watching the video with all the hindsight of 2010 is like watching the 'funnies' of the early aviators; I think this was also considered when the film was transferred to digital as the sound track is very much "magnificent men in their flying machines". One of John Burkam's comments seemed most appropriate in that stabilisation was an area that was still poorly understood with the inference that this would be the area to concentrate on and in some respects it proved to be correct. So, it was concluded that successful control of a model helicopter was still a long way off however, between Dieter's short but erratic flights and Wilfried's controlled hovering it did highlight the answer was 'out there'. P.S.
Return to - History Pre 1970 or Schlüter prototypes
Top of Page (VRHC - Vintage Radio controlled HeliCopters) |
|
|