Helicopter Early Gyro's
Gyro's 1969
 Dieter Schlüter's 1969 electro-mechanical gyro.
Dieter Schlüter's 1969 electro-mechanical gyro.
Tail rotor control was to cause Dieter Schlüter significant problems in 1969 when he was experimenting with collective pitch for height control. To counter the quite violent 'swings' when pitching up or down he designed a mechanical gyro that was wired into the tail rotor feedback pot and thus as the tail swung one way, the gyro put in an opposing tail rotor pitch control. Unfortunately it was very sensitive and actually caused more problems that it cured so he discontinued using it.
 Burkam Super Suzie 1969 mechanical tail rotor mounted gyro.
Burkam Super Suzie 1969 mechanical tail rotor mounted gyro.
John Burkam due to his background already knew a lot about gyro stabilisation and so his model called the Super Suzie incorporated a mechanical gyro driven by the tail rotor and directly 'mixed' into the tail rotor control system. Quite effective and the additional mass of the flywheel at the tail increased the helicopters inertia which also helped to slow down the tail rotation. Unfortunately, as can be seen in the photo above, it required very good metal working skills and tools which the 'average' modeller did not posses. It also made the helicopters tail very heavy which required a 'boom' projecting from the front of the model for counter-balance.

 S.S.P. 1972 Burkam mechanical tail rotor mounted gyro
S.S.P. 1972 Burkam mechanical tail rotor mounted gyro
Gene Rock utilised a modified 'Burkam' tail gyro on his 1972 OD helicopter; same principle but easier to make for the 'average' modeller when building from the plan.

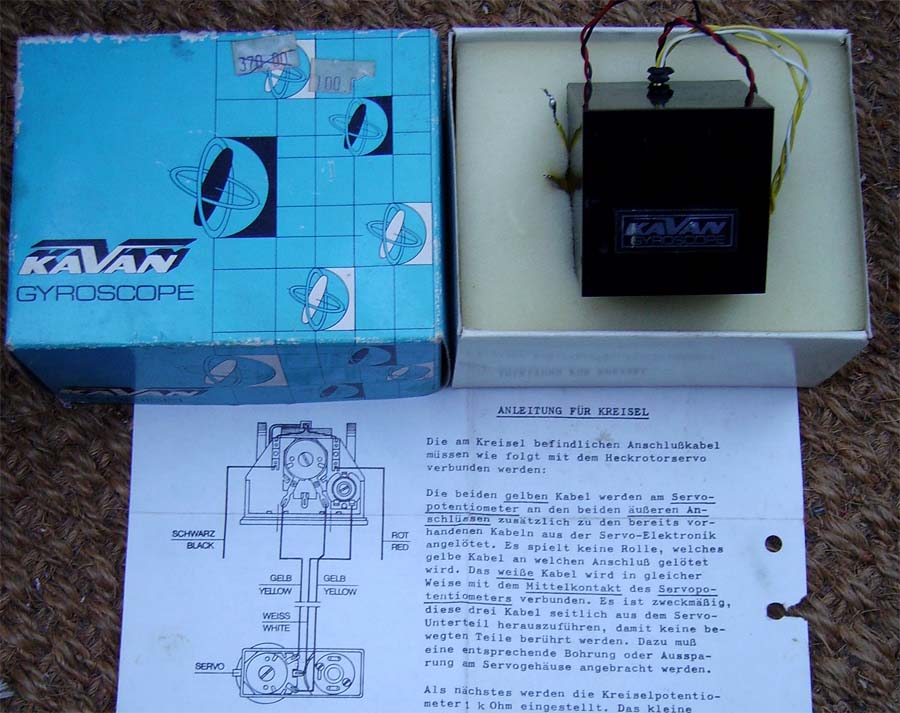 Kavan 1974 electro-mechanical 'rate' gyro - Single unit requiring wiring into tail rotor servo.
Kavan 1974 electro-mechanical 'rate' gyro - Single unit requiring wiring into tail rotor servo.
Kavan introduced their helicopter in 1973 which had collective pitch control and they were very quick to acknowledge that tail control of a collective pitch machine was much more difficult than that of a fixed pitch machine. To compensate for this in 1974, they introduced a mechanical gyro which was wired into the feedback potentiometer of the tail rotor servo and worked by moving the neutral point in the feedback circuit thus in effect simulating movement of the transmitter stick. Same principle as that previously used by Dieter Schlüter however, the developments in electronics meant that sensitivity was better controlled and thus it did help dramatically in 'taming' the tail.
The gyro was relatively expensive though not when considered to the overall price of a helicopter or the repair cost if damaged due to 'loss' of tail control. However, it was not commonly used and so manufacturers also began fitting mechanical tail control / collective mixers which removed the 'offset' tail control problems of collective pitch models which helped with the tail swings and thus the need for gyro's was reduced and it would be into the 80's before their use would start to grow.
There were a number of Japanese made electro-mechanical Gyro's available late 70's but currently I have no information on these. ##########
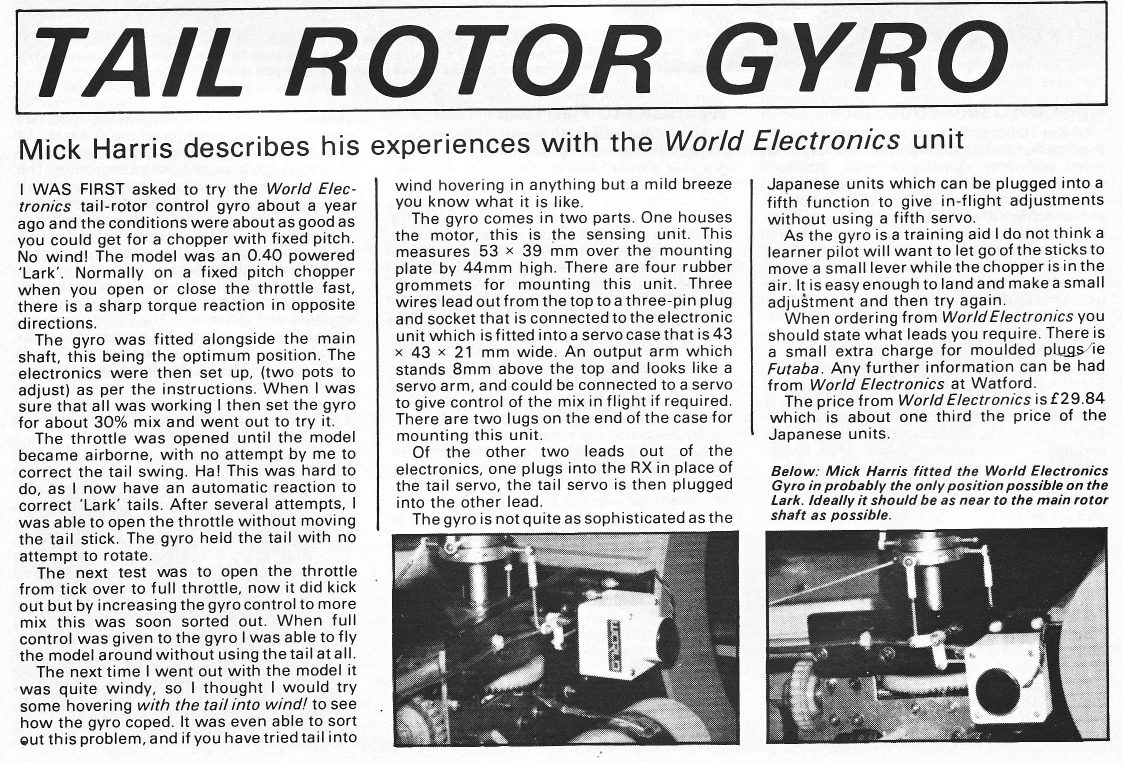 1979 World Electronics rate Gyro.
1979 World Electronics rate Gyro.
World Electronics (UK) had originally produced a gyro that like the Kavan unit required wiring into the tail servo however in 1979 they upgraded this to make it a 'stand alone' system that just plugged in between the receiver and the tail servo. As noted in the 1980 magazine article, it also included an in-flight adjustment capability by using a fifth servo connected to the gyro gain unit. One downside of this unit was that as gyro gain increased, tail rotor authority from the transmitter reduced and too much gain meant very little stick power. For a learner this was not a great problem as the tail needed taming until full control could be learnt and after this the gyro gain could be reduced until a compromise was achieved to get the required authority for flight whilst retaining good hover stability.
It is noted that some Japanese units of the time had the the gain adjustment incorporated directly into the electronics being directly activated by the transmitter fifth channel; it did though make this type more expensive and thus for the average modeller the WE gyro was more affordable.