E_sky Lama V4

We are currently in the midst of an epidemic of co-axial contrarotating model helicopters, ranging from micro to medium in size. The general concept produces a stable, easy to fly, model and many of these can do no more than go up and down and rotate. Some don't even have proportional control.
My own response has been one of dismissal, verging on contempt. When I saw a Hirobo 'Lama' demonstrated, I was impressed with the stability but wondered, "What can you do with it?" It did eventually penetrate that the model was controllable and could be flown around. In the usual manner of things, a number of 'clones' became available, all considerably cheaper than the original. When I saw an E_sky 'Lama V4' advertised on eBay at a silly price (Ł14.99) I just had to try one.
The 'V4' version is actually the semi-scale 'V3' with a streamlined body fitted. Available in blue or silver, I think the blue one looks rather like a parrot - particularly with the raked forward undercarriage.
The whole concept is an interesting one. The top (anticlockwise) rotor is self-stabilising via a flybar, while the lower (clockwise) rotor has direct (flybarless) cyclic input via swashplate from two servos. The oddity from the point of view of a conventional helicopter is that all the control inputs are at 45 degrees. The flybar on the upper rotor is 45 degrees in advance of the blades, while the inputs to the lower swashplate are also at 45 degrees. The lateral servo input is to the right and behind, the for/aft input is to the left and behind. This is clearly due to the gyroscopic effects of the two contra-rotating rotors. No, I haven't worked it out yet, either.
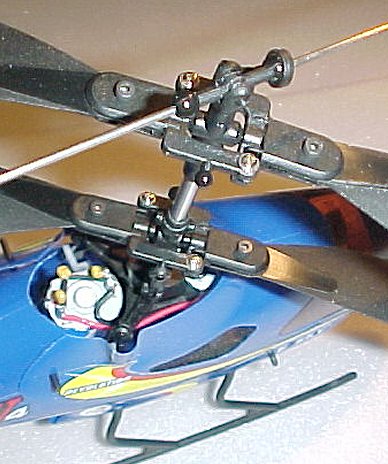
What is clear is that the model 'hangs' from the self-stabilising upper rotor and this is overpowered by the lower rotor for directional inputs. There are interesting questions here, i.e. could a large control input lead to a clash of the rotors? Also, can a collision, or crash, lead to the rotors clashing? After exhaustive tests I can reveal that the answer to both questions is "yes"!
Battery position is critical and can produce large trim changes. There is a continuous change in tail trim, because the rather cheap drive motors change their characteristics as they warm up. And they do get very warm. There is a trim adjuster on the control unit, but it appears to have little, if any, effect.
An experienced heli flyer will take a while to get used to the fact that control inputs need to be held on to get any result. You can't 'nudge' it forwards and leave it to fly forwards, you have to hold on some forward control. Release the control and the model will stop - but not immediately.
There are several ways to change the response. You can reduce the stability by reducing the flybar weights (or moving them inwards). Alternatively, you can increase the control action by using longer servo arms. As supplied, the arms are cut right down and I couldn't find any longer replacements (short of buying another servo).
Things were resolved for me when one of the original servos stopped working - after just 12 flights. It was the motor that had failed. I salvaged a motor from another Chinese 'clone' servo, with a blown amplifier, and repaired this one. This made me decide to change both servos with two more of those clones (Tower 'SG-50') with arms exactly twice the length of the originals. This gave much better and more positive controls. although there was a tendency to 'bounce' fore and aft which appeared to be due to the flybar on the upper rotor hitting the end stops. I reduced the length of the arm on the fore/aft servo and found a reasonable balance.
One weakness of the rotor arrangement is that in any sort of 'arrival', the weighted flybar has more than enough leverage to damage the yoke at the top of the inner shaft. This is a simple plastic moulding with the flybar snapped into place inside it. I tried a repair which gave a greater flybar movement and found that this (surprise!) gave greater stability and I was back to square one. As an experiment I tried introducing a thin piece of rubber under the flybar to reduce the movement and damp the response. NOT recommended - it was almost unflyable. I tried building up the saddle with epoxy to reduce the flybar movement to near the original and the control returned to normal. Scope for more experiment here.

One other development ws the failure of one of the drive motors at 40 flights. I opened it up to see what had happened and the commutator had come apart, losing one of its segments. There is no way to lubricate the bearing at the brush end. The motors get very hot and a heatsink would be a good idea. There is so much around the motors that it is difficult to see how this might be done, but I'm working on it. There are some after-market replacements available with exposed brush gear - but at a price.
My one problem with the blue Lama was that I couldn't see it in my usual indoor flying site. Having discovered that the 'Blade CX2' bodies were available in several colours, I bought a yellow one to to replace the Lama body. It's a tight fit but all you need do is remove the lower part of the body behind the battery opening. There are a couple of lumps in the body but they are only visible if you know about them.


I made a new undercarriage from 2mm carbon rod and 5/32" diameter aluminuim tubing (I like to see alloy skids). It helps to be able to see the rotor disc so I added a stripey pattern to the lower blades, leaving the upper blades black. The result is that you only see the lower blades and it looks more like a 'proper' helicopter.
Curiously, my flybarless, collective 'Hornet' isn't a problem. The Lama is effectively flybarless (the control rotor is) and has an immediate response, like the flybarless Hornet. It's the flybar controlled model that has such a different response that you take time to adapt.
There appears to be more than one manufacturer of these and the parts available here could be made to a different standard. Lets hope so, because the set that I bought from Hong Kong left a lot to be desired.
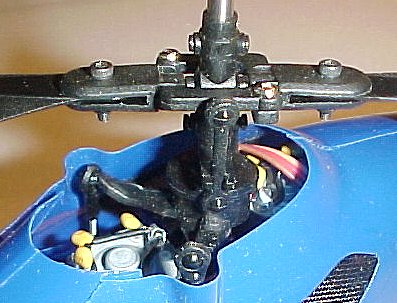
They were certainly rather more than 'bolt-on' and needed a lot of work. Most of the bits were far from square and didn't fit together too well. The top rotor hub has two brass inserts which serve as pivots for the rotor head. The two holes for these appear to have been drilled from each side rather than straight through and the two inserts are not inline, meaning that the top rotor head is off centre. The saddle for the flybar does not accept the standard flybar at all as it has far too much clearance. I found some suitable eyelets to insert in the saddle and then had to bend the saddle outwards to get them in. There is a bridge piece over the top of the saddle which at least stops the flybar getting out.
One of the problems with the standard plastic head mentioned above is that the flybar pops out in any 'arrival'. One way of preventing this is to fit another link to the flybar so that the loads are balanced. The only way to get another link though is to buy another flybar.
The lower rotor head is reasonable but you either need to use the original plastic links or (as I did) buy another plastic head set to get them. The metal swashplate sounds like a great idea but it is not interchangeable with the plastic one. It extends further down and needs some pruning or rearrangement of the motor connections to get it in. It also has much less movement available than the plastic version for the same reason.

All of the distances are different to the plastic versions (lengths of arms, swashplate radii, etc.) and the result is a different 'feel' to the standard version. For a time I was plagued by the model performing a regular pendulum movement rather than staying on a spot. This was traced to the flybar and links on the top rotor not being free enough.
The exercise of building up a model from parts is not the cheapest solution and cost more than a complete outfit. This despite using the original Lama fuselage plus one of the original motors together with making my own undercarriage.


I scanned the logos from the box and used rub-down decal paper (inkjet type) to copy them onto both models. I now have two different looking Lamas though, to be honest, the second one wasn't really worth the time and effort.

Airborn shot (frozen by flash) shows how much the blades bend under load.
With the servos supplied, the control response is so minimal that this may not be a problem but using the transmitter with the supplied simulator lead shows that the trims drift constantly and the centring is far from reliable. I tried flying the model using another transmitter and found a vast improvement. However, using a transmitter with more than four channels does not suit the an-board mixer and will result in a slow rudder response. Another problem is the very aggressive throttle response and I have now modified the transmitter to soften this.
The obvious comment here is that 'you get what you pay for', but I now have a smaller, cheaper heli with better performance and far better overall quality (Walkera '5G6').

![]()
![]()
![]()
![]()