
The Russians have been building co-axial helis for a long time. Full-size Kamov K32A in HeliSwiss colours.
Why counter-rotate? - Advantages - Disadvantages - Improving performance - Conclusions
The world of model helicopters has been undergoing something of a revolution of late - this being early 2008. A few years back, the advent of the so-called micro heli (in truth they were no more than mini) led to the usual progression where they became bigger and more powerful and then we suddenly had the advent of smaller and more stable helis. Many of these had contra-rotating (or counter-rotating) co-axial rotors. One of the first of these was the 'Bladerunner'. This had a small horizontal tail rotor to allow the machine to be tilted backwards and forwards to give horizontal flight. In fact, the model was so stable that this extra rotor did virtually nothing.
It all started here - the original 'Bladerunner'. The horizontal tail rotor did virtually nothing.
Since then, they have got both larger and smaller (and still smaller). The Hirobo 'Lama' (originally controlled by an umbilical cord, but later by R/C) really set the pattern for an increasing number of clones. This had the upper rotor fitted with a delta hinged flybar which gave great stability, combined with a lower rotor which had direct cyclic input to allow the model to be flown around in circuits by overpowering the top rotor. Rather less obvious here is that the flybarless 'control' rotor gave an immediate response which made the model easier to control in a small space.
For a while we had a very confusing situation where there were a great number of similar models with co-axial rotors, some of which could merely go up and down and pirrouette, some could be flown backwards and forwards but not sideways and some which could be flown around like a 'proper' heli. Price is no guide here, but the control gear should have a minimum of four channels. Beware the two or three channel helicopter.

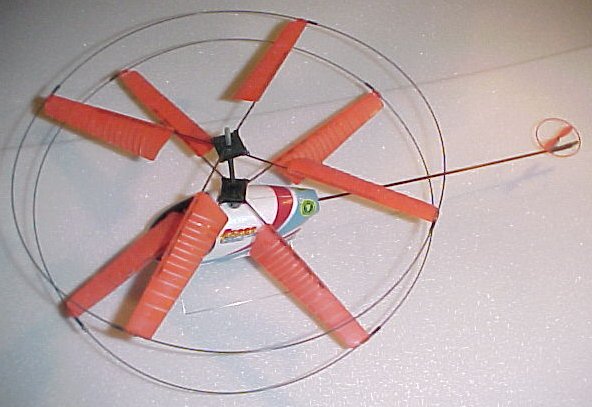
One of many very similar models - The E_sky 'Lama V4'
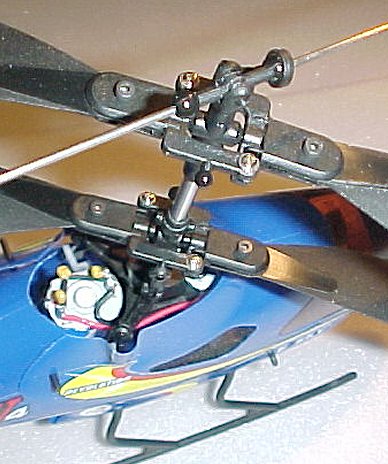
Articulated upper rotor with offset flybar combined with a flybarless lower rotor with direct cyclic input from two servos via a swashplate. Note that control inputs are at 45 degrees due to opposing gyroscopic effects of the two rotors.
The Russian Kamow (Kamov) company started producing co-axial helis way back in 1951 (they were the first to put a turbine in a heli). Some time in the 1980's, the Kalt company announced a scale model of one of the Kamov machines. It was claimed that this could be flown on three channels - which no-one quite believed at the time. Unfortunately, the kit never reached the market so we will never know how this was to be done. In the light of recent developments it becomes much more credible. My theory was that it was flown on just throttle and conventional rudder/elevator controls. It's just a theory...
It is fairly obvious that co-axial rotors can produce a stable helicopter. Although the full-size machines have fairly complex linkages to interconnect two flybarless, collective pitch rotors, the current generation of models simplify things dramatically by having two motors (one to each fixed pitch rotor) which are independantly controlled and interconnected electronically. The upper rotor gives stability (you could call this 'umberella' stability) while the lower rotor allows you to control the model via cyclic pitch changes. Yaw control is acheived by varying the speed of both motors (differential torque). Full-size machines vary the collective pitch of one, or both, rotors for yaw control.
By removing the tail rotor, you also remove several aerodynamic effects.. The most noticeable one being that the push of the tail rotor means that the helicopter tends to move sideways and needs lateral trim to offset this, resulting in a visible 'lean'. Clockwise rotating main rotors mean that the heli leans to the right, while anticlockwise rotors produce a left lean. Learning model pilots soon become aware of the models wish to skid sideways on lift-off. Those learning to fly nose-in then have to accustom themselves to the fact that it appears to lean the other way. There are other effects, including a tendency to yaw in forward flight
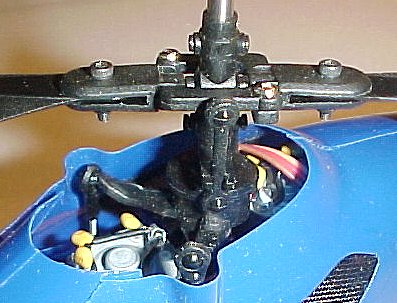
Most of the models employ a weighted flybar on the upper rotor. This flybar simply snaps into a moulded plastic saddle. In any 'arrival' (spelled 'crash') the inertia of the flybar will break the plastic saddle. Metal up-grades are becoming available, but these will simply lead to something else breaking.
The stabilty can be changed by changing the weight, length or travel of the flybar. More weight, greater length or more travel will increase the stability. Less weight, length or travel will reduce the stability.
More control can be obtained by using longer servo arms to increase the swashplate movement. Over-doing this can result in the model rocking noticably due to the flybar bouncing off its end stops. A little experiment will give an acceptable balance and good 'feel'. Minor changes to the flybar movement can have a noticable effect on this feel.
I still find it difficult to accept that it is now possible to buy a model helicopter that virtually anyone can fly 'out-of-the-box'. Thirty odd years ago, it took me three years to learn to hover, albeit without a gyro.
